干渉計システムのメカニズム
干渉法のメカニズム
はじめに
干渉法で最も一般的に使用される計器、マイケルソン干渉計は、アメリカ人として初めて科学部門のノーベル賞を受賞した Albert Abraham Michelson によって 1887 年に発明されました。Michelson は、鏡と半透明鏡 (ビームスプリッタ) を使用して同じ光源から発射された光を分離してからマージする方法を考案しました。レーザー干渉法は、距離を高精度で測定するうえで確立された手法です。
基本原理

コヒーレント光源から照射された 1 本の進入ビームを、マイケルソン干渉計で 2 本の同一ビームに分離します。各ビームは異なるルート (パス) を通り、検出器に到達する前に再結合されます。ここで各ビームの移動距離の差により、位相差が形成されます。この位相差によって、最初は同じであった波の間で干渉パターンが形成され、検出器で検出されます。単一ビームを 2 本のパス (測定パスと参照パス) に分離すると、位相差によってこれらのパスに沿った、位相に影響を与える要因が示されます。この要因としては、パス長自体の物理的変化やビームが移動する空間の屈折率の変化などが考えられます。
マイケルソン干渉計
レーザービーム (1) が光源から照射され、干渉計で 2 本のビーム (参照ビーム (2) と測定ビーム (3)) に分かれます。この 2 本のビームが、2 個の反射鏡によって反射され、干渉計で再結合されて検出器に戻ります。
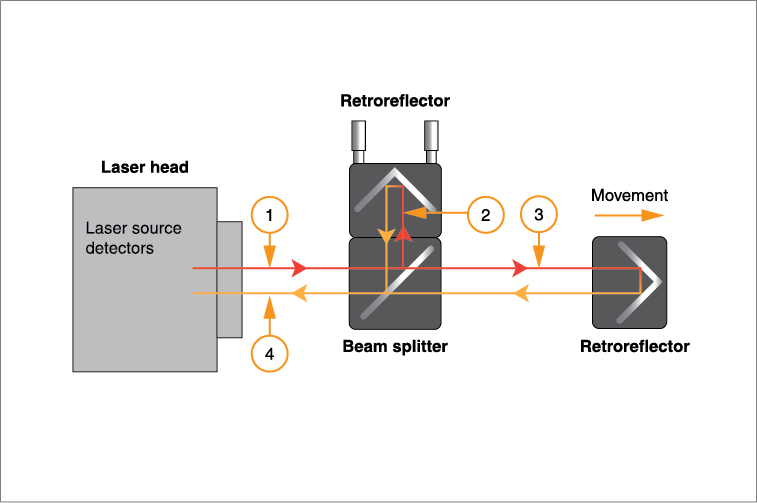
反射鏡を使用することで、参照パスと測定パスからのビームが干渉計で再結合される際の平行性が保たれます。再結合されたビームが検出器に到達すると、お互いを強めあう (建設的干渉) か弱めあう (相殺的干渉) ことになります。強めあう干渉では、2 本のビームが同相になり両ビームの山が増強されて干渉縞が明るくなります。一方、弱めあう干渉ではビームが逆相になり 1 本のビームの山が 2 番目の谷によって打ち消されて干渉縞が暗くなります。
信号処理
検出器内の光学信号処理により、これら 2 本のビームの干渉を観察できます。測定ビームがずれた場合には、2 本のビームの相対的な位相に変化が起こります。この強めあう干渉と弱めあう干渉の周期によって、再結合された光の強さに周期的な変化が発生します。明るい干渉縞から暗い干渉縞になり明るい干渉縞に変わる位相差の一周期は、測定ビーム/反射鏡 (3) が半レーザー波長分移動するたびに見られることになります。
システムの精度
位置決め測定精度は、レーザービームの波長精度に依存します。レーザービームの動作波長はレーザービームが通過する空気の屈折率に依存し、この屈折率は気温、気圧、相対湿度に応じて変化します。従って、これらの環境条件の変化に合わせて、ビームの波長を変化させる (補正する) 必要があります。
RLE システム
RLE システムは、位置決めフィードバックのために特別に設計した、レニショー独自の最先端ホモダインレーザー干渉計システムです。RLE システムは、RLU レーザーユニットと RLD10 ディテクタヘッドで構成されます。どのモデルを使用するかは、ニーズによって異なります。
凡例:
RLE のメカニズム
| レーザー光源 | ファイバカップリング | 干渉計光学部品 | 測定用光学部品 | 検出機構 | エンコーダのフィードバック信号 |
 |  |  |  |  |  |
RLU のメカニズム
RLU から RLD にレーザーを出力
| レーザー光源 | 安定化電子回路 | ファイバカップリング | スポット位置の安定性 |
|  | |  |
RLD の信号の送信
| エンコーダのエラー信号 | システムステータス | デジタル内挿分割 | アナログエンコーダ信号 |
|  |  |  |
RLD のメカニズム
RLD から測定用光学部品へレーザー出力
| 干渉計光学部品 | ビームステアラ |
平面鏡または反射鏡と使用する、周期誤差を最低限に抑えたユニークな光学機構 |  ビームの角度調整を簡素化することで取付け時間を短縮するための、内蔵光学くさび |
測定光学部品から RLD へのレーザー入力
| アナログエンコーダ信号 | 検出機構 | 測定用光学部品 |
 検出機構から RLU へのアナログ矩形波 | 内蔵干渉縞検出機構が、参照ビームおよび測定ビームからの干渉縞を電子信号に変換 | 高反射性で硬質酸化コーティングの誘導体ミラー |
HS20 システム

HS20 レーザーヘッドは、長軸かつ高精度位置決めフィードバック用のコンポーネントです。外付けの位置決めオプチカルキットと組み合わせて使用して、干渉計を使用した非接触式エンコーダシステムの中核として役割を果たします。
デジタルまたはアナログのエンコーダ信号を受信できるモーションコントロールシステムの位置決め制御ループに統合できます。OEM やレトロフィット (後付け) として、リニアエンコーダシステムの代わりに取り付けられます。
HS20 のメカニズム
| レーザー光源 | 安定化電子回路 | 測定用光学部品 | エラー信号と警告信号 | エンコーダのフィードバック信号 |
 安定したクラス 2 (<1mW) HeNe レーザー |  レーザーチューブヒータアセンブリのモジュレーションによるレーザー周波数安定性の制御に使用 |  最長 60m の機械軸に使用できる長距離光学部品 |  アクティブエラーライン (レーザー軸ごと) を簡単に機械コントローラに統合して、クローズドループ操作を実現 |  高分解能の位置決めフィードバックを行うための、業界標準のデジタル/アナログ矩形波 |
補正システム
レーザー干渉計なら、無条件で究極の測定精度が得られるものと思われがちですが、実際は簡単にいきません。レーザーで空気中の位置決め偏差を測定する場合は、環境補正装置の性能が特に重要です。レーザーと干渉計光学部品は非常に高レベルの位置決め分解能と精度を備えていますが、大気中での使用時、測定精度を左右するには環境補正装置です。
偏差は、波長で表現されます。従って、正確で繰り返し再現性に優れた測定を行うには、波長の一定性が重要です。レーザービームが空気中を通過する際、その波長は屈折率に応じて変化します。一方、エンコーダからの測定値には、温度変化によるワークや機械構造の膨張が反映されていません。
このような誤差を補正し、大気中で最高の精度を確保するには、環境補正装置が不可欠です。
精度に影響を及ぼす環境要因
屈折率:
 |  |  |
気温 | 相対湿度 | 気圧 |
熱膨張率:
 |
物体温度 |
RCU10 環境補正システム
RCU10 リアルタイム環境補正システムは、リニアモーションシステムの環境起因によるエラーを補正して、プロセスの精度と繰り返し精度を改善します。気温/気圧センサーを介して周囲環境をモニタし、高度なデジタル信号処理によりリアルタイムで位置決めフィードバック信号の補正を行います。補正されたフィードバック信号は、アナログまたはデジタルのいずれかでモーションコントローラに送られます。

RCU10 のメカニズム
下図に、RCU10 のワークフローを示します。
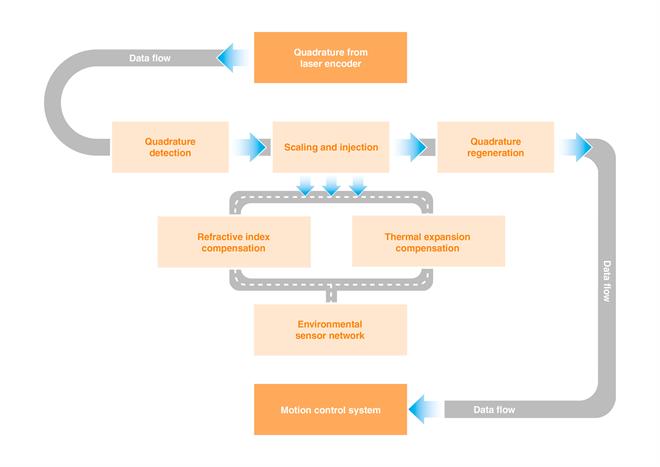
RCU10 環境補正システムは、気温/気圧センサーが収集した環境データと共にデジタル信号を受信し、軸の位置を補正するために必要な合計補正量を計算します。その後、エンコーダフィードバック信号への矩形波の調整 (矩形波パルスの追加/削除) を行うことで、必要な補正を行います。この処理自体は、モーションコントローラに対する最小限の遅延で実施されます。補正されたフィードバック信号は、デジタルまたはアナログのいずれかでモーションコントローラに送られます。