MODUS™ Planning Suite
Obvladajte svoj KMS z minimalnim trudom ter izboljšajte učinkovitost z zbirko MODUS Planning Suite.
Zbirka MODUS Planning prinaša uporabnikom programske opreme MODUS vrsto avtomatiziranih bližnjic za pogoste izzive pri programiranju delov ter z do uporabnika prijaznimi specializiranimi programskimi aplikacijami zagotavlja maksimalno učinkovitost glav REVO® za KMS. Aplikacije iz zbirke MODUS Planning omogočajo načrtovanje merilnih poti za komponente s kompleksno geometrijo z minimalnim trudom in izboljšano učinkovitostjo.
Programska oprema z vgrajeno napredno tehnologijo za načrtovanje ponuja offline orodja za simulacijo gibanj in pripravo kode DMIS, ki predstavlja meritve delov brez trkov.
Trenutno so na voljo tri ločene modularne aplikacije za platformo MODUS Planning Suite:
MODUS Blade planner
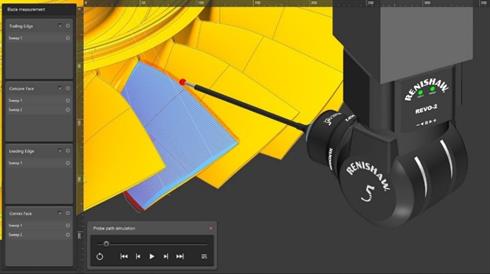
Meritev lopatic
Funkcija popolne kontrole lopatic v aplikaciji MODUS Blade planner omogoča načrtovanje sledilnega skeniranja na konkavnih in konveksnih površinah ter na sprednjem in na zadnjem robu lopatice.
Nastavitve in merilne strategije omogočajo prilagajanje merilnih poti za nadzorovanje števila prehodov na površino ter spreminjanje smeri meritev med vzdolžnimi in prečnimi prehodi.
Meritev prerezov
Modul Blade planner ponuja dve metodi za merjenje prereza lopatic:
- Sledilno skeniranje po prerezih z možnostjo sestavljanja.
Sledilno skeniranje poteka z visoko gostoto točk na prerezih, kjer se zbirajo podatki o profilu, in z nizko gostoto točk med prerezi, kjer zbiranje podatkov ni potrebno. Ta metoda zmanjša tudi število približevanj in umikanj za krajše cikle. - Krivuljno skeniranje prerezov na ploskvah
Za konkavne in konveksne ploskve se pripravi skeniranje po krivuljah, za sprednje in zadnje robove pa polno sledilno skeniranje.
Zbirka MODUS Planning ustvari kodo DMIS za meritev površine aerodinamičnega profila. MODUS 1.9 nato izvede to kodo DMIS in uporabniku omogoči analizo aerodinamičnega profila v vsakem prerezu.
Meritev delnih površin
Modul MODUS Blade planner vključuje vse metode izbire iz aplikacije MODUS Patch planner kot orodja za načrtovanje poti za celotno površino lopatic in njihovo okolico:
- Ustvarjanje delnih površin iz točk na obrisu (površina)
- Določitev delnih površin z izbranimi ploskvami (ploskev)
- Ustvarjanje delnih površin iz točk na središčnici
- Ustvarjanje delnih površin iz robov na modelu CAD
Spodaj lahko preberete celoten opis modula MODUS Patch planner za zbirko MODUS Planning Suite.
Ostali modularni aplikaciji za MODUS Planning Suite sta:
MODUS Patch planner
Uporabniki so morali prej sami z ročnimi orodji določati poti za sledilno skeniranje površin, da bi se izognili trkom. Nova aplikacija MODUS Patch zdaj hitro in preprosto pripravi najbolj učinkovito merilno pot za senzor REVO RSP2 s samodejnim načrtovanjem poti.
- Ustvarjanje delnih površin iz točk
Določite pot za sledilno skeniranje tako, da na modelu CAD obrišete četverorobo področje z množico točk. - Ustvarjanje delnih površin iz ploskev
Kliknite na model CAD ter izberite površino ali množico povezanih točk na površini, da opredelite delno površino. - Ustvarjanje delnih površin iz robov na modelu CAD
Uporabite robove na modelu CAD za določitev poti za sledilno skeniranje. S tem orodjem lahko kot rob izberete tudi rezino MODUS. Programska oprema določi najkrajšo pot, ko izberete začetne in končne točke. - Ustvarjanje delnih površin z risanjem središčnic
Določite pot za sledilno skeniranje tako, da izberete vrsto točk na središčnici na površini.
Po določitvi metode izbire lahko v meniju za nastavitve po potrebi uredite še širino, smer in druge lastnosti za sledilno skeniranje.
Ostali modularni aplikaciji za MODUS Planning Suite sta:

Ustvarjanje poti za sledilno skeniranje iz točk in ploskev

Ustvarjanje poti za sledilno skeniranje iz robov na modelu CAD in središčnice
MODUS Curve planner
Modul za načrtovanje krivulj ponuja dve možnosti: RSP2 Curve in RSP3 Curve. RSP3 zagotavlja izboljšano zmogljivost za meritve kompleksnih geometrij z različnimi sestavi merilnih glav.
Krivulje je mogoče opredeliti z izbiro robov na modelu CAD ali s klikanjem na točke na ravnini.
Ustvarjanje krivulj na robovih CAD-modela
Krivulje opredelite z izbiro robov na CAD-modelu ali robov rezine, ustvarjene s programom MODUS.

Skiciranje krivulje na ravnini
Krivulje opredelite s klikom na več točk na ravnini. Iz njih se izračuna zlepek, ki določa pot.

Dodatne izbire pri možnosti RSP2 Curve
Ustvarjanje odmika roba na ravnini
Po določitvi zahtevane ravnine na CAD-modelu in izbiri robov se uveljavi vrednost odmika.
Vrsta grafičnih funkcij dopolnjuje programske nastavitve za preprosto kombiniranje in rezanje poti, ki dajo naučinkovitejše rezultate.
Na ploskvi lahko izberete več robov in jih nato povežete. Pripravljena meritev tako ne zapušča površine in s tem se skrajša čas, ki je potreben za premike med meritvami.
Ustvarjanje odmika roba za izogibanje značilnostim na ravnini
Ta možnost po izbiri ravnine in roba samodejno zazna geometrijo na CAD-modelu, ki se ji mora meritev izogniti, ter posodobi pot in vrednosti odmika.
Uporabnik lahko izbere rob na vsaki merilni krivulji.
Dodatne izbire za možnost RSP3 Curve
Segmenti s fiksnim kotom glave
Glava RSP3 meri s fiksnimi koti glave in se lahko med skeniranjem po krivulji odmakne od površine za prilagoditev kota glave.
Element RSP3 Curve v modulu MODUS Curve omogoča opredelitev segmentov meritve, na katerih se merilna glava ne odmika od površine. Uporabnik lahko tako izpolni zahteve po območjih z visoko točnostjo na krivuljni poti.
Hitra in preprosta uporaba
Po izbiri krivulje lahko v nastavitvah preprosto uredite parametre, kot je smer skeniranja.
Aplikacija za obe metodi določitve krivulj zagotavlja omejeno gibanje KMS za zmanjšanje gibanja osi KMS pri meritvah krivulj na ravnini.
Kombinacija omejenih osi ter načrtovanja gibanj brez trkov prinaša znatno skrajšanje časa programiranja za hitre in učinkovite meritve po krivuljah.
Ostali modularni aplikaciji za MODUS Planning Suite sta:

Z omejitvijo gibanja osi stroja na eno samo ravnino se izboljšata točnost in ponovljivost.
Zakaj omejiti gibanje KMS?
Z omejitvijo ene ali več osi KMS lahko dosežemo maksimalno uporabo gibanja glave REVO® in minimalno gibanje KMS. Z omejitvijo dveh osi in gibanjem samo po osi, ki je vzporedna z merjeno ravnino, se stroj upogiba v kontrolirani ravnini, kar ne uvaja nobenih napak. S tem se ponuja priložnost za hitrejše meritve delov oz. izboljšanje ravni točnosti obstoječih strojev.
Pri meritvah ravnosti tesnilne površine bloka motorja lahko npr. z omejitvijo dveh osi pohitrimo delovanje stroja, ne da bi s tem uvedli merilne napake. Glava REVO se v idealnem primeru dviga in spušča po osi Z stroja (omejeni sta osi X in Y), saj ima ta os najmanjšo premično maso. V tem primeru ni nobenih upogibnih sil in prisotna sta samo tlak/nateg po dolžini nastavka, kjer je ta zelo tog. Če gibanje po osi Z ni izvedljivo, je naslednja izbira os X (omejeni sta osi Z in Y), ki je druga po najmanjši premični masi. V primerjavi s približevanjem glave merjencu in odmikanjem od njega, kar je značilno za tradicionalno 5-osno skeniranje, je metoda ugodnejša tudi za os Y.
Dodatne informacije
Pomoč in usposabljanje
V namestitvenem paketu so tudi filmi in vzorčni CAD-modeli za pomoč pri usposabljanju.
Združljivost programske opreme
Koda DMIS iz zbirke MODUS Planning se izvaja v programski opremi MODUS. Za polno združljivost je potrebna različica MODUS 1.9.
CAD-modeli morajo biti v formatu .Sab.
Združljivost strojne opreme
Podprta kombinacija strojne opreme za to različico zbirke MODUS Planning je REVO-2 z glavo za skeniranje RSP2.