W jaki sposób działają systemy interferometryczne?
Jak działa interferometria?
Wprowadzenie
Najczęściej używane narzędzie interferometryczne — interferometr Michelsona — został wynaleziony przez Alberta Abrahama Michelsona w 1887 roku. Był on pierwszym Amerykaninem, któremu przyznano nagrodę Nobla za osiągnięcia naukowe. Opracował on system zwierciadeł i półprzezroczystych zwierciadeł (rozdzielaczy wiązki) do łączenia rozdzielonych wiązek światła, które pochodzą z tego samego źródła. Interferometria laserowa jest dopracowaną metodą pomiaru przemieszczeń z dużą dokładnością.
Podstawowa zasada działania

W interferometrze Michelsona dochodzi do rozdzielenia pojedynczej, przychodzącej wiązki światła spójnego na dwie identyczne wiązki. Każda z tych wiązek ma inną trasę, zwaną torem; wiązki łączą się przed dojściem do detektora. Różnica w odległości przebytej przez każdą wiązkę wprowadza przesunięcie fazowe między nimi. Przesunięcie fazowe przyczynia się do powstania obrazu interferencyjnego pomiędzy początkowo identycznymi falami, który jest wykrywany przez detektor. Jeśli pojedyncza wiązka rozdziela się na dwa tory (pomiarowy i odniesienia), wtedy przesunięcie fazowe jest miarą czynnika wprowadzającego go na tych torach. Może to być fizyczna zmiana długości samego toru lub zmiana współczynnika załamania światła w środowisku wiązki światła.
Interferometria Michelsona
Wiązka laserowa (1) wychodzi ze źródła światła laserowego i dzieli się na dwie wiązki (odniesienia (2) i pomiarową (3)) w interferometrze. Te wiązki ulegają odbiciu od dwóch retroreflektorów i łączą się przed dojściem do detektora.

Zastosowanie retroreflektorów daje pewność, że wiązki pochodzące z ramion odniesienia i pomiarowego są równoległe w momencie ich połączenia w interferometrze. Połączone wiązki dochodzą do detektora, gdzie zachodzi ich interferencja konstruktywna lub destruktywna. W trakcie interferencji konstruktywnej dwie wiązki są w fazie, zaś strzałki obu wiązek ulegają wzmocnieniu, co powoduje powstanie jasnego prążka. W trakcie interferencji destruktywnej wiązki nie są z sobą w fazie, a strzałki jednej wiązki znoszą się z węzłami drugiej wiązki, co powoduje powstanie ciemnego prążka.
Obróbka sygnału
Obróbka sygnału optycznego w detektorze umożliwia obserwowanie interferencji tych dwóch wiązek. Przemieszczenie wiązki pomiarowej powoduje zmianę fazy względnej dwóch wiązek. Ten cykl interferencji konstruktywnej i destruktywnej powoduje cykliczną zmianę natężenia połączonej wiązki światła. Jeden cykl zmiany natężenia ze światła jasnego na ciemne występuje wtedy, gdy wiązka pomiarowa/retroreflektor (3) przesuwa się o połowę długości fali lasera.
Dokładność systemu
Dokładność pomiarów położenia liniowego zależy od dokładności znajomości długości fali wiązki lasera. Robocza długości fali wiązki laserowej zależy od współczynnika załamania światła powietrza, przez które oba przechodzi; zmienia się zależnie od temperatury powietrza, jego ciśnienia i wilgotności względnej. Dlatego też trzeba zmieniać (kompensować) długości fali w celu uwzględnienia wszystkich zmian tych parametrów.
Systemy RLE
System RLE jest unikalnym, zaawansowanym systemem interferometrycznym z laserem jednoczęstotliwościowym, przeznaczonym specjalnie do zapewnienia precyzyjnego, położeniowego sprzężenia zwrotnego. Każdy system RLE składa się z zespołu lasera RLU i jednej lub dwóch głowic detekcyjnych RLD10 i można go dostosować do wymogów danego zastosowania.
Legenda:
W jaki sposób działa system RLE?
| Źródło światła laserowego | Połączenie światłowodowe | Układ optyczny interferometru | Optyczny układ pomiarowy | Schemat wykrywania | Sygnały sprzężenia zwrotnego enkodera |
 |  |  |  |  |  |
W jaki sposób działa system RLU?
Wyjście laserowe z modułu RLU do głowicy RLD
| Źródło światła laserowego | Stabilizujący układ elektroniczny | Połączenie światłowodowe | Stabilność wskazania wiązki |
|  | |  |
Przetwarzanie sygnału w module RLD
| Sygnały błędu enkodera | Stan systemu | Interpolacja cyfrowa | Sygnały analogowe enkodera |
|  |  |  |
W jaki sposób działa system RLD?
Wyjście laserowe z modułu RLD do optycznego układu pomiarowego
| Układ optyczny interferometru | Sterownik wiązki |
Unikatowe konfiguracje optyczne o minimalnym błędzie cyklicznym (SDE) zgodne z układem optycznym ze zwierciadłem płaskim lub retroreflektorem |  Wbudowany klin optyczny skraca czas instalacji do minimum poprzez uproszczoną orientację kątową wiązki |
Wejście laserowe z optycznego układu pomiarowego do modułu RLD
| Sygnały analogowe enkodera | Schemat wykrywania | Optyczny układ pomiarowy |
 Analogowy sygnał kwadraturowy generowany przez schemat detekcyjny i przekazywany bezpośrednio do modułu RLU | Wbudowany schemat detekcyjny zamienia prążki interferencyjne z wiązki pomiarowej i odniesienia na sygnał elektroniczny | Zwierciadła o wysokim współczynniku odbicia z twardą, tlenkową powłoką dielektryczną |
Systemy HS20

Głowica laserowa HS20 firmy Renishaw w połączeniu z zewnętrznym zestawem układu optycznego do pomiarów liniowych tworzy bezdotykowy, interferometryczny system enkodera laserowego, który można wykorzystać do dokładnych pomiarów położenia liniowego w maszynach z długimi osiami.
Głowica laserowa HS20 nadaje się do wbudowania w pętlę sterowania pozycją dowolnego, dynamicznego układu sterowania, do którego można doprowadzić cyfrowy lub analogowy, kwadraturowy sygnał z enkodera. Głowica laserowa może bezpośrednio zastąpić system enkodera liniowego zarówno w zastosowaniu OEM, jak i modernizowanym systemie.
W jaki sposób działa system HS20?
| Źródło światła laserowego | Stabilizujący układ elektroniczny | Optyczny układ pomiarowy | Sygnały | Sygnały sprzężenia zwrotnego enkodera |
 Stabilizowany laser HeNe klasy 2 (<1 mW) |  Używana do kontrolowania stabilności częstotliwości lasera poprzez modulowanie zespołu grzałki rury lasera |  Układy optyczne dalekiego zasięgu do pomiarów osi obrabiarek do 60 |  Aktywne linie błędów, oddzielne dla każdej osi lasera, można łatwo zintegrować ze sterownikiem obrabiarki w celu pracy w pętli zamkniętej |  Standardowy cyfrowy lub analogowy kwadraturowy sygnał sprzężenia zwrotnego położenia wysokiej rozdzielczości |
Systemy kompensacji
Często przyjmuje się, że interferometry laserowe automatycznie zapewniają najwyższą dokładność systemów pomiarowych. W rzeczywistości jest to o wiele bardziej skomplikowane. W trakcie laserowego pomiaru przemieszczenia liniowego w powietrzu bardzo ważny jest system kompensacji wpływu otoczenia. laserowy i interferometryczny optyczny układ pomiarowy charakteryzuje się bardzo wysoką rozdzielczością liniową i precyzją, niemniej jednak w wypadku pomiarów „w powietrzu” występuje układ kompensacji wpływu otoczenia, który ma główny wpływ na dokładność pomiaru systemu.
Przemieszczenie jest reprezentowane pod względem określonej długości fali. Dlatego też dokładny i stabilny pomiar zależy od stałości długości fali. W trakcie przemieszczania się wiązki lasera w powietrzu długość fali zależy od współczynnika załamania światła.
Z kolei w pomiarze wykonywanym przez enkoder nie uwzględnia się rozszerzalności przedmiotu obrabianego ani konstrukcji obrabiarki w wyniku zmienności temperatury.
Zastosowanie systemu kompensacji jest konieczne w celu skompensowania powyższego błędu i zapewnienia najwyższej dokładności w wypadku pomiarów „w powietrzu”.
Czynniki środowiskowe wpływające na dokładność
Współczynnik załamania światła:
 |  |  |
Temperatura powietrza | Wilgotność względna | Ciśnienie powietrza |
Rozszerzalność termiczna:
 |
Temperatura materiału |
System kompensacji RCU10
System RCU10 przeznaczony do kompensacji kwadraturowej realizowanej w czasie rzeczywistym umożliwia wyeliminowanie źródeł błędów w systemach ruchu liniowego w celu poprawienia dokładności i powtarzalności.
System RCU10 monitoruje środowisko otoczenia obrabiarki przy użyciu czujników i wykorzystuje zaawansowaną obróbkę sygnałów w celu zapewnienia kompensacji sygnałów położeniowego sprzężenia zwrotnego w czasie rzeczywistym. System przekazuje skorygowane sygnały sprzężenia zwrotnego do sterownika w formacie analogowym lub cyfrowym.

W jaki sposób działa system RCU10?
Na poniższym rysunku przedstawiono logikę działania systemu RCU10.
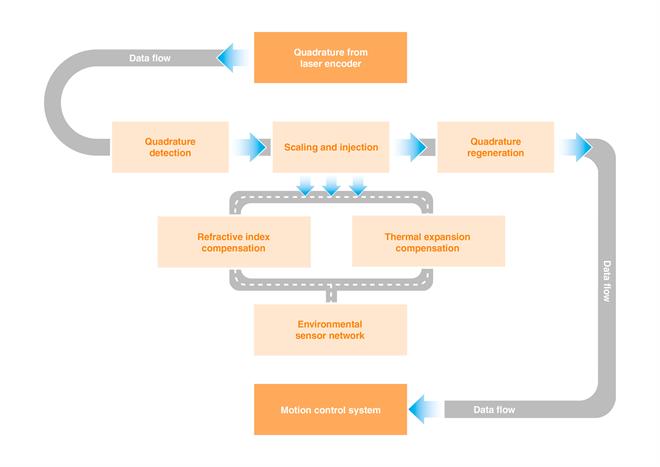
Do systemu kompensacji RCU10 podłącza się cyfrowy sygnał kwadraturowy, a także sygnały z czujników pomiarowych parametrów środowiskowych. Następnie system oblicza łączną poprawkę wymaganą do skorygowania pozycji osi. Wymaganą poprawkę wprowadza się przez kwadraturowe skalowanie i sumowanie lub odejmowanie impulsów kwadraturowych od sygnału sprzężenia zwrotnego enkodera, przy czym ten cały proces odbywa się przy minimalnym opóźnieniu względem sterownika. Skorygowane sygnały sprzężenia zwrotnego są podawane do sterownika w formacie analogowym lub cyfrowym.