Hoe werken interferometersystemen?
Hoe werkt interferometrie?
Inleiding
De meest gebruikelijke 'Michelson' interferometer werd in 1887 uitgevonden door Abraham Michelson, de eerste Amerikaan die een Nobelprijs voor wetenschap won. Hij bedacht een systeem van spiegels en half-doorzichtige spiegels (bundelsplitsers) om afzonderlijke lichtbundels uit dezelfde lichtbron samen te voegen. Laserinterferometrie is een welbekende methode om afstanden te meten met hoge nauwkeurigheid.
Basisprincipes

Een enkele bundel uit een bron van samenhangend licht wordt gesplitst in twee identieke bundels door een Michelson interferometer. De beide bundels leggen een verschillende route af (ook pad genoemd) en worden weer gecombineerd voordat ze in een detector aankomen. Het verschil tussen de afstanden die de bundels aflegden veroorzaakt een onderling faseverschil. Dit veroorzaakte faseverschil creëert een interferentiepatroon tussen de aanvankelijk identieke golven, en de detector identificeert dat. Als één bundel gesplitst is over twee paden (meting en referentie), dan blijkt het uit hun faseverschil als iets langs de paden de fase heeft veranderd. Dat kan een fysieke verandering van de padlengte zijn, of een verandering in de brekingsindex waar de bundel doorheen gaat.
Michelson interferometrie
De laserbundel (1) komt uit de laserbron en wordt in de interferometer gesplitst in twee bundels: referentie (2) en meting (3). Deze bundels worden teruggekaatst door de twee retro-reflectoren en daarna opnieuw gecombineerd, voordat ze gezamenlijk de detector bereiken.
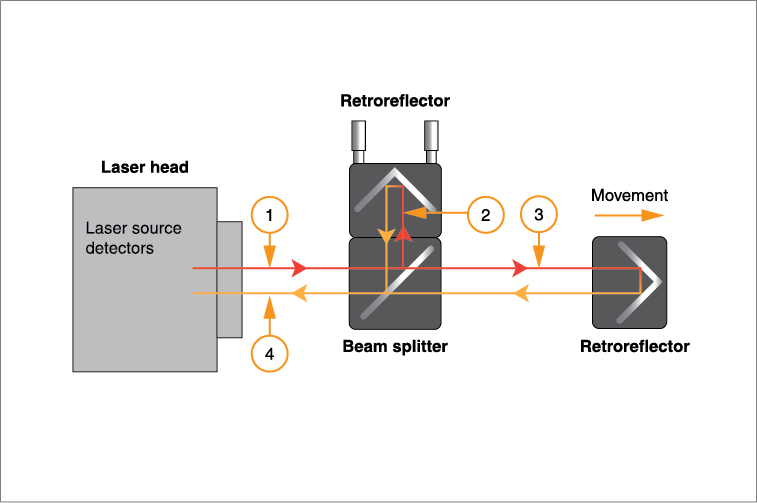
Door retro-reflectoren te gebruiken is het zeker dat de bundels voor referentie en die voor meting evenwijdig zijn wanneer ze weer samenkomen in de interferometer. De opnieuw gecombineerde bundel bereikt de detector, waar de twee delen met elkaar interfereren op een constructieve of destructieve wijze. Tijdens constructieve interferentie zijn de twee bundels in fase en versterken de toppen van beide bundels elkaar, waardoor een heldere band ontstaat. Bij destructieve interferentie zijn de bundels uit fase en worden de toppen van de ene teniet gedaan door de dalen van de andere, waardoor een donkere band ontstaat.
Signaalverwerking
Met de optische signaalverwerking van de detector wordt de interferentie van de twee bundels geobserveerd. Verplaatsing van de meetbundel veroorzaakt veranderingen in de onderlinge fase van de twee bundels. Door deze cyclus van destructieve en constructieve interferentie ondergaat de intensiteit van het opnieuw gecombineerde licht een cyclische variatie. Iedere keer als de retro-reflector van de meetbundel (3) wordt verplaatst over een halve lasergolflengte, doet zich één variatiecyclus voor in de intensiteit van licht naar donker naar licht.
Nauwkeurigheid van het systeem
De nauwkeurigheid van de lineaire positiemetingen hangt af van de nauwkeurigheid waarbinnen de golflengte van de laserbundel bekend is. De operationele golflengte van de laserbundel hangt weer af van de brekingsindex van de lucht waar de bundel doorheen gaat, en die verandert met de luchttemperatuur en -druk en de relatieve vochtigheid. Daarom moet de golflengte van de bundel steeds aangepast (gecompenseerd) worden, zodat veranderingen in deze parameters worden meegenomen.
RLE systemen
Het RLE systeem is een uniek, geavanceerd interferometersysteem met homodyne laserdetectie, specifiek ontwikkeld voor positiefeedbacktoepassingen. Elk RLE systeem bestaat uit een RLU laserunit en een of twee RLD10 detectorkoppen, waarvan het model afhankelijk is van de vereisten van de specifieke toepassing.
Belangrijkste:
Hoe werkt het RLE-systeem?
| Laserbron | Koppeling met glasvezel | Interferometeroptieken | Meetoptica | Detectiesysteem | Terugkoppelsignalen uit de encoder |
 |  |  |  |  |  |
Hoe werkt de RLU?
Laseruitvoer van de RLU naar de RLD
| Laserbron | Stabilisatie-elektronica | Koppeling met glasvezel | Stabiliteit van bundelrichting |
|  | |  |
Verwerking van het signaal terug naar de RLD
| Foutsignalen van de encoder | Systeemtoestand | Digitale interpolatie | Analoge encodersignalen |
|  |  |  |
Hoe werkt de RLD?
Laseruitvoer van de RLD naar de meetoptieken
| Interferometeroptieken | Bundelsturing |
Unieke optische ontwerpen met geminimaliseerde interpolatiefout, passend bij meetoptieken met ofwel een vlakke spiegel ofwel een retro-reflector |  Een ingebouwde optische wig die de tijd voor installeren minimaliseert door een vereenvoudigde hoekinstelling van de bundel te bieden |
Laserinvoer van de meetoptieken naar de RLD
| Analoge encodersignalen | Detectiesysteem | Meetoptica |
 Intrinsiek analoog kwadratuursignaal, gegenereerd vanuit het detectiesysteem en rechtstreeks doorgegeven aan de RLU. | Het ingebouwde banddetectiesysteem zet de interferentiebanden van de meting en de referentie om in een elektronisch signaal | Sterk reflecterende spiegels met harde diëlektrische oxidecoating |
HS20 systemen

De Renishaw HS20 laserkop in combinatie met een externe lineaire optiekenset vormt een contactloos interferometrisch laserencodersysteem voor langassige, uiterst nauwkeurige lineaire positieterugkoppeling.
De HS20 laserkop kan opgenomen worden in de positiebesturing van elk bewegingssysteem dat te configureren is voor het werken met digitale of analoge encodersignalen in kwadratuurformaat. De laserkop kan gemonteerd worden als directe vervanging van lineaire encodersystemen in zowel nieuw gebouwde als al bestaande machines.
Hoe werkt de HS20?
| Laserbron | Stabilisatie-elektronica | Meetoptica | Fout- en waarschuwings | Terugkoppelsignalen uit de encoder |
 Gestabiliseerde klasse 2 HeNe-laser |  Regelt de stabilisatie van de laserfrequentie door de verwarming van de laserbuis te moduleren |  Optische oplossing met groot bereik voor machineaslengtes tot 60 m |  Actieve foutlijnen, apart voor elke laseras, zijn gemakkelijk te integreren in de machinebesturing zodat een gesloten kringloop ontstaat |  Digitale of analoge kwadratuursignalen volgens industriële standaard voor positieterugkoppeling met hoge resolutie |
Compensatiesystemen
Vaak wordt aangenomen dat laserinterferometers automatisch de ultieme meetnauwkeurigheid leveren. In werkelijkheid is de situatie echter ingewikkelder. Bij het meten met een laser van lineaire verplaatsingen door lucht is de kwaliteit van het compensatiesysteem voor omgevingsfactoren van groot belang. De laser en de interferometrische meetoptieken leveren lineaire resoluties en precisie van hoog niveau, maar bij toepassingen in 'gewone lucht' is de omgevingscompensator het meest bepalend voor de meetnauwkeurigheid van het hele systeem.
De verplaatsing wordt weergegeven in de vorm van een bepaalde golflengte. Daarom is een nauwkeurige en herhaalbare meting gebaseerd op het constant zijn van de golflengte. Wanneer de laserbundel zich door de lucht beweegt, varieert de golflengte in afhankelijkheid van de brekingsindex.Daarnaast houdt de meting van de encoder geen rekening met de uitzetting van het product of van de machineconstructie vanwege temperatuurschommelingen.
Om de genoemde foutbronnen te compenseren en zeker te zijn van de hoogste nauwkeurigheid in de 'gewone lucht' is een compensatiesysteem noodzakelijk.
Omgevingsfactoren die de nauwkeurigheid beïnvloeden
Brekingsindices:
 |  |  |
Luchttemperatuur | Relatieve vochtigheid | Luchtdruk |
Thermische uitzetting:
 |
Materiaaltemperatuur |
RCU10 compensatiesysteem
Het RCU10 real-time kwadratuurcompensatiesysteem verhelpt voor lineaire bewegingssystemen foutbronnen vanuit de omgeving, om de nauwkeurigheid en herhaalbaarheid van het proces te verbeteren.De RCU10 bewaakt via een reeks sensoren de directe omgeving van een machine en voert met geavanceerde digitale signaalverwerking een real-time compensatie uit op de signalen van de positieterugkoppeling. Het apparaat levert de gecorrigeerde terugkoppelsignalen in analoge of in digitale formaten aan de bewegingsbesturing.

Hoe werkt de RCU10?
Het schema hieronder laat zien hoe de RCU10 te werk gaat.
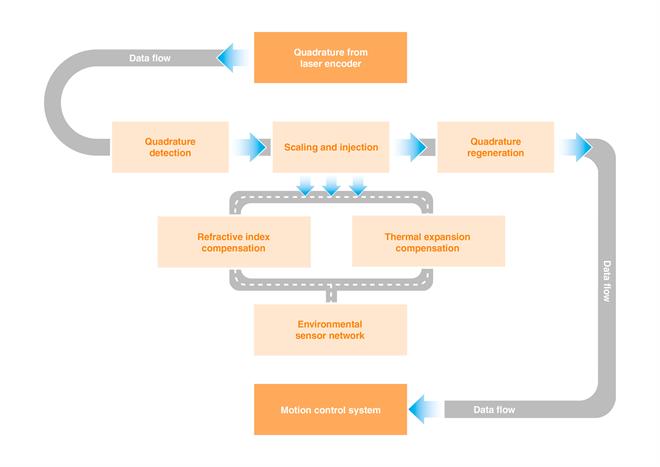
De RCU10 compensator neemt digitale kwadratuursignalen op, tegelijk met de omgevingsgegevens die van een reeks sensoren komen, en berekent de totale compensatie die nodig is om de aspositie te corrigeren. De vereiste compensatie wordt dan toegepast door de kwadratuur te verschalen en het terugkoppelsignaal van de encoder te bewerken (toevoegen of verwijderen van kwadratuurpulsen). Dit alles geeft maar een minimale vertraging naar de bewegingsbesturing toe. De gecorrigeerde terugkoppelsignalen worden aangeboden aan de bewegingsbesturing in ofwel een digitaal ofwel een analoog formaat.