Jak funguje interferometrický systém?
Jak funguje interferometrie?
Úvod
Nejběžnější interferometrický nástroj, Michelsonův interferometr, vynalezl v roce 1887 Albert Abraham Michelson, první Američan, který získal Nobelovu cenu za vědu. Vytvořil systém zrcadel a polopropustných zrcadel (děličů paprsku) pro sloučení rozdělených paprsků světla vycházejících ze stejného zdroje. Laserová interferometrie je osvědčená metoda pro vysoce přesné měření vzdáleností.
Základní princip

Michelsonův interferometr štěpí jediný vstupní paprsek koherentního světla na dva identické paprsky. Oba paprsky, z nichž každý prochází po jiné dráze, před dopadem na detektor interferují. Rozdíl vzdáleností, po nichž paprsky procházely, vytvoří mezi nimi fázový rozdíl. Takto vzniklý fázový rozdíl vytvoří mezi původně identickými vlnami interferenční obrazec, který je identifikován detektorem. Jestliže byl jediný paprsek rozdělen do dvou drah (měřicí a referenční), pak tento fázový rozdíl diagnostikuje cokoli, co podél těchto drah změnilo fázi. Může to být fyzická změna vlastní dráhy, nebo změna indexu lomu prostředí, jímž paprsek prochází.
Michelsonova interferometrie
Laserový paprsek (1) vychází z laserového zdroje a je v interferometru rozštěpen na dva paprsky (referenční (2) a měřicí (3)). Tyto paprsky jsou dvěma odrážeči odraženy zpět, a před dopadem na detektor interferují.

Použití odrážečů zaručuje rovnoběžnost paprsků přicházejících z referenční a měřicí větve, které pak vzájemně interferují. Paprsky dopadají na detektor, kde vzájemně interferují buď konstruktivně nebo destruktivně. Při konstruktivní interferenci jsou oba paprsky ve fázi, jejich amplitudy se vzájemně zesilují a vytvářejí jasné pruhy. Při destruktivní interferenci oba paprsky ve fázi nejsou, jejich amplitudy se vzájemně ruší a vytvářejí tmavé pruhy.
Zpracování signálu
Zpracování optického signálu detektorem umožňuje sledovat interferenci obou paprsků. Posunutí měřicího paprsku způsobí změnu relativní fáze obou paprsků. Tento cyklus konstruktivní a destruktivní interference způsobuje cyklické změny intenzity rekombinovaného světla. K cyklu změny intenzity jasná-tmavá-jasná dochází vždy, když se měřicí paprsek/odrážeč (3) posunou o polovinu vlnové délky laseru.
Přesnost systému
Přesnost lineárního měření polohy závisí na přesnosti, s jakou je známá vlnová délka laseru. Provozní vlnová délka laseru závisí na indexu lomu vzduchu, jímž paprsek prochází, a mění se s teplotou, tlakem a relativní vlhkostí vzduchu. Proto je nutno vlnovou délku paprsku měnit (kompenzovat) pro přizpůsobení změnám těchto parametrů.
Systémy RLE
Systém RLE je jedinečný pokročilý homodynní laserový interferometrický systém, který byl navržen speciálně pro aplikace polohové zpětné vazby. Systém RLE tvoří laserová jednotka RLU a jedna nebo dvě detekční hlavice RLD10, jejichž typ závisí na specifických požadavcích aplikace.
Klíč:
Jak funguje systém RLE?
| Laserový zdroj | Optické spojení | Optika interferometru | Měřicí optika | Schéma detekce | Zpětnovazební signály snímače |
 |  |  |  |  |  |
Jak funguje systém RLU?
Laserový výstup z RLU do RLD
| Laserový zdroj | Stabilizační elektronika | Optické spojení | Stabilita zaměření paprsku |
|  | |  |
Zpracování signálu zpět do RLD
| Chybové signály laserového odměřovacího systému | Status systému | Digitální interpolace | Analogové signály laserového odměřovacího systému |
|  |  |  |
Jak funguje RLD?
Laserový výstup z RLD do měřicí optiky
| Optika interferometru | Zaměřovač laserového paprsku |
Unikátní optické schéma s minimalizovanou chybou interpolace (SDE), kompatibilní jak s měřicí optikou s rovinným zrcadlem, tak s odrážečem. |  Vestavěný optický hranol, umožňující zjednodušené úhlové nastavení paprsku, minimalizuje dobu instalace |
Laserový vstup z měřicí optiky do RLD
| Analogové signály laserového odměřovacího systému | Schéma detekce | Měřicí optika |
 Vnitřní analogová kvadratura generovaná z detekčního schématu a předávaná přímo do RLU | Vestavěná detekce proužků převádí interferenční proužky z měření a reference na elektronické signály. | Vysoce odrazivá dielektrická zrcadla s povlakem tvrdého oxidu |
Systémy HS20

Laserová hlava Renishaw HS20 je základním prvkem bezkontaktního interferometrického laserového odměřovacího systému pro odměřování polohy na dlouhých osách nebo při vysokých rychlostech pohybu.
Laserovou hlavu HS20 lze začlenit do řídicí polohové smyčky libovolného systému pro řízení pohybu, který lze konfigurovat pro příjem signálu snímače ve formátu digitální nebo analogové kvadratury. Laserovou hlavu lze osadit jako přímou náhradu lineárních snímacích systémů jak v aplikacích OEM, tak v retrofit aplikacích.
Jak funguje HS20?
| Laserový zdroj | Stabilizační elektronika | Měřicí optika | Chybové a výstražné | Zpětnovazební signály snímače |
 Stabilizovaný HeNe laser třídy 2 (<1 mW) |  Slouží pro řízení stability frekvence laseru modulací laserové trubice. |  Řešení optiky s dlouhým dosahem pro strojní osy o délce až 60 m |  Do zpětnovazebního systému stroje lze pro provoz v uzavřené smyčce snadno integrovat aktivní chybové čáry, individuální pro každou osu laseru. |  Digitální nebo analogové kvadratury průmyslového standardu pro polohovou vazbu s vysokým rozlišením. |
Kompenzační systémy
O laserových interferometrech se často předpokládá, že poskytují nejvyšší přesnost měření. Ve skutečnosti je však situace mnohem složitější. Při měření lineárních posunutí laserem ve vzduchu je zvláště důležitá schopnost systému kompenzovat vlivy prostředí. Laserová a interferometrická měřicí optika poskytuje velmi vysoké úrovně lineárního rozlišení a přesnosti, avšak u aplikací ‘ve vzduchu' odpovídá za přesnost měření systému především jednotka pro kompenzaci vlivu prostředí.
Posunutí je vyjadřováno ve smyslu specifikovaných vlnových délek. Přesnost a opakovatelnost měření proto závisí na konstantní vlnové délce. Když laserový paprsek prochází vzduchem, mění se jeho vlnová délka v závislosti na indexu lomu.Na druhé straně, měření ze snímače nebere v úvahu roztažnost obrobku a konstrukce stroje, způsobenou změnami teploty.
Pro kompenzaci výše uvedených zdrojů chyb a pro zajištění co nejvyšší přesnosti v aplikacích ‘ve vzduchu' je nutný kompenzační systém.
Faktory prostředí ovlivňující přesnost
Faktory indexu lomu:
 |  |  |
Teplota vzduchu | Relativní vlhkost | Tlak vzduchu |
Teplotní roztažnost:
 |
Teplota materiálu |
Kompenzační systém RCU10
Systém RCU10 pro kvadraturní kompenzaci v reálném čase odstraňuje zdroje chyb okolního prostředí v lineárních pohybových systémech a zlepšuje tak přesnost a opakovatelnost procesu.RCU10 monitoruje okolní prostředí stroje pomocí sítě snímačů a vyspělým zpracováním digitálního signálu provede v reálném čase kompenzaci signálů zpětné vazby polohování. Jednotka poskytuje řídicímu systému pohybu korigované zpětnovazební signály ve formátu analogového nebo digitálního snímače.

Jak funguje RCU10?
Níže uvedené schéma zobrazuje průběh činnosti RCU10.
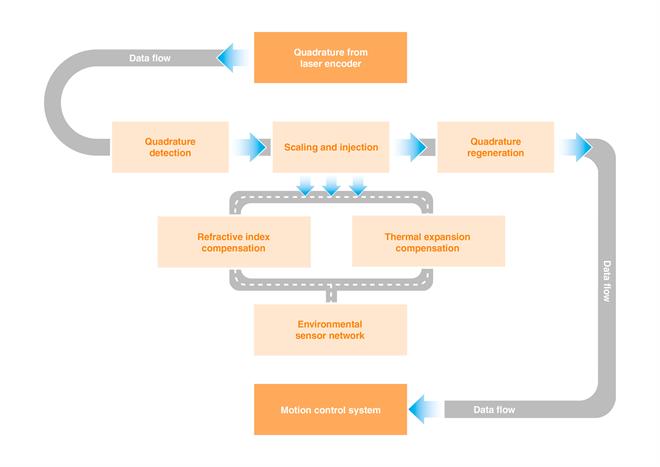
Kompenzační jednotka RCU10 přijímá digitální kvadraturu souběžně s daty okolního prostředí, shromážděnými sítí snímačů, a vypočítává celkovou velikost kompenzace, potřebnou pro korekci polohy osy. Požadovaná kompenzace je potom realizována kvadraturním dělením a dodáváním (přidávání nebo odebírání kvadraturních impulsů) do zpětnovazebního signálu snímače. Celý proces je proveden s minimálním zpožděním k řídicí jednotce pohybu. Řídicí jednotce pohybu jsou poskytovány korigované zpětnovazební signály ve formátu analogového nebo digitálního snímače.