干涉儀系統的運作方式?
干涉量測法如何運作?
簡介
第一位贏得諾貝爾科學獎的美國人 Albert Abraham Michelson,於 1887 年發明的 Michelson 干涉儀,是干涉量測法最常見的工具。他利用鏡子和半透明鏡子(分光鏡)合併來自相同光源的不同光束。雷射干涉量測法是確立已久的距離量測方法,具有很高的精度。
基本原理

通常是以 Michelson 干涉儀將一致光源的單一入射光束分成兩組相同光束。每組光束都行經不同的路徑,並在抵達偵測器前重新組合。各光束行經距離的差異會形成彼此之間的相位差。這就是在一開始相同波形中形成干擾型態的相位差,與在偵測器上的完全相同。如果單一光束分成兩個路徑(量測及參考),則相位差可判斷在前述路徑改變相位的任何項目。這可能是路徑長度本身的實際變更,或光束行程中的折射率變更。
Michelson 干涉量測法
來自雷射光源的雷射光束 (1) 在干涉儀中分成兩組光束(參考 (2) 及量測 (3))。這些光束由兩組反射鏡反射回來,先於干涉儀中重新結合,再抵達偵測器。

使用反射鏡確保來自參考與量測臂的光束,在干涉儀中相互重新結合時維持平行。重新結合的光束抵達偵測器,並在偵測器中有建設性或破壞性的相互干擾。在建設性干擾期間,兩組光束為同相且兩組光束的峰值會相互補強,產生明亮的條紋;而在破壞性干擾期間,光束為異相且其中一組光束的峰值會因第二組光束通過而取消,產生晦暗的條紋。
訊號處理
偵測器中的光學訊號處理,可觀察這兩組光束的干擾情形。量測光束位移會造成兩組光束的相對相位出現變化。破壞性與建設性干擾的循環,會導致重新結合光的強度出現週期性變化。每次量測光束/反射鏡 (3) 移動達半個雷射波長時,就會出現一次強度由亮轉暗再轉亮的週期變化。
系統精確度
線性定位量測的精確度端視已知雷射光束的波長精確度而定。雷射光束的運算波長視通過空氣中的折射率而定,而這會隨氣溫、氣壓與相對濕度改變。因此,光束的波長需改變(補償)才能容納這些參數的所有變化。
RLE 系統
RLE 系統為獨特先進零差雷射干涉儀系統,專為位置回饋應用所設計。各 RLE 系統由一個 RLU 雷射裝置及一個或兩個 RLD10 檢測頭組成,使用機型取決於特定應用的需求。
鍵:
RLE 如何運作?
| 雷射光源 | 光纖連接 | 干涉儀光學鏡組 | 量測光學鏡組 | 偵測計畫 | 編碼器回饋訊號 |
 |  |  |  |  |  |
RLU 如何運作?
由 RLU 輸出雷射至 RLD
| 雷射光源 | 穩定電子元件 | 光纖連接 | 光束指向穩定性 |
|  | |  |
處理回到 RLD 的訊號
| 編碼器錯誤訊號 | 系統狀態 | 數位細分 | 類比編碼器訊號 |
|  |  |  |
RLD 如何運作?
由 RLD 輸出雷射至量測光學鏡組
| 干涉儀光學鏡組 | 光束準直輔助鏡 |
獨特的光學計畫,含最小 SDE 並相容於平面鏡或反射鏡量測光學鏡組 |  內建光學楔形鏡配備簡化射束角調整,可用於縮減安裝時間 |
由量測光學鏡組輸入雷射至 RLD
| 類比編碼器訊號 | 偵測計畫 | 量測光學鏡組 |
 由偵測計畫產生內在類比正交並直接傳遞至 RLU | 在建立條紋偵測計畫中,會轉換量測與參考中的干擾條紋為電子訊號 | 高反射度硬質氧化物塗層電介質鏡 |
HS20 系統

Renishaw HS20 雷射頭結合外部線性光學鏡組套件,構成非接觸式雷射干涉編碼器系統,用於長軸、高精度、線性位置回饋應用。
HS20 雷射頭可整合至任何運動控制系統的位置控制迴路,並可設定為接受數位或類比正交格式的編碼器訊號。雷射頭可安裝於 OEM 和升級改裝應用,直接更換線性編碼器系統。
HS20 如何運作?
| 雷射光源 | 穩定電子元件 | 量測光學鏡組 | 錯誤及警告 | 編碼器回饋 訊號 |
 穩定二級 (<1 mW) HeNe 雷射 |  藉由調變雷射管加熱器總成以控制雷射頻率穩定性 |  長達 60 m 機器軸長度的長距離光學鏡組解決方案 |  獨立於各雷射軸外的主動錯誤行可輕易整合至機器控制器進行閉路運算 |  業界標準的數位或類比正交,提供高解析度的位置回饋 |
補償系統
通常假設雷射干涉儀會自動提供最佳量測精確度。不過實際的情形更為複雜。利用雷射測量空氣中的線性位移時,環境補償系統的效能格外重要。雷射與干涉儀量測光學鏡組提供非常高的線性解析度和精準度,不過在「空中」應用中,則由主要負責系統量測精確度的環境補償裝置為主。
位移是以指定波長的方式表示。因此,精確且可重複的量測仰賴波長的恆定性。雷射光束穿越空氣時,波長會因折射率而異。另一方面,由於溫度變化的緣故,編碼器的量測不會考慮工件的膨脹或機器結構。
若要補償以上的誤差來源,並確保為「空中」應用提供最高精確度,則必須利用補償系統。
影響精確度的環境因素
折射率因素:
 |  |  |
氣溫 | 相對濕度 | 氣壓 |
熱膨脹:
 |
材料溫度 |
RCU10 補償系統
RCU10 即時正交補償系統克服了線性運動系統中的環境誤差來源,並改善製程的精確度和可重複性。RCU10 透過一系列的感應器來監控機器周圍環境,並使用先進的數位訊號處理能力以執行位置回饋訊號的即時補償。本裝置以類比或數位編碼器格式提供運動控制器修正的回饋訊號。

RCU10 如何運作?
下圖顯示 RCU10 的工作流程。
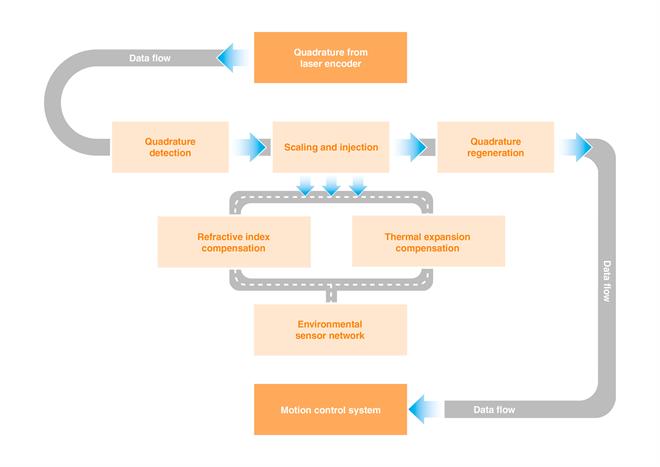
RCU10 補償裝置接受數位正交,以及由一系列感應器收集的環境資料,並計算修正軸位置所需的補償總數。所需補償透過正交比例套用,注入(增加或移除正交脈衝)至編碼器回饋訊號之中,在運動控制器延遲時間最短的情況下完成總程序。以數位或類比編碼器格式提供運動控制器修正的回饋訊號。