Энкодеры AksIM™ помогают компании Universal Robots осуществлять интеллектуальную автоматизацию производства
Промышленные роботы обычно работают в безопасных зонах и используются для тяжёлых, особо опасных и повторяющихся операций в авиакосмической отрасли, сборке автомобилей, погрузочно-разгрузочных работах, окраске, нанесении покрытий и других областях применения. Традиционные промышленные роботы обычно отличаются очень большими размерами и громоздкостью, занимают много пространства, а процессы их программирования, как правило, требуют много времени.
Использование коллаборативных роботов (роботов, предназначенных для физического взаимодействия с людьми в совместной рабочей зоне) становится быстро растущей тенденцией в современной автоматизации производства. Такие роботы предназначены для работы с людьми и помогают завершить запланированные задачи производства с помощью простого и быстрого программирования или даже процессов самообучения. Роботы больше не являются эксклюзивным решением лишь для крупных компаний; предприятия малого и среднего бизнеса также могут эффективно использовать их.
Датская компания Universal Robots (UR) является одним из самых успешных и известных производителей роботов на рынке. В производимых ею многокоординатных коллаборативных роботах используются магнитные угловые абсолютные энкодеры серии AksIM, отличающиеся исключительной производительностью, безопасностью и стабильностью работы.Независимо от того, насколько хорошо спроектирован робот, его максимальная функциональность и эффективность всё-таки зависят от используемых в нём компонентов. Обычно робот состоит из основного корпуса (скелета), системы сервопривода, редуктора и системы управления. Для отслеживания положения каждого соединения в режиме реального времени и передачи данных в систему ЧПУ требуется обратная связь по положению, поэтому энкодер также является важнейшим компонентом для обеспечения точности робота.
Роботы UR отличаются гораздо лучшими рабочими характеристиками благодаря использованию магнитного углового энкодера AksIM, поставляемого RLS – ассоциированной компанией Renishaw.Энкодер прикрепляется к задней части редуктора, чтобы напрямую контролировать фактический угол поворота соединения робота. По сравнению с некоторыми конструкциями роботов, где энкодер прикреплен к передней части редуктора, такой подход исключает систематические ошибки и обеспечивает повторяемость ±0,1 мм, что достаточно для удовлетворения большинства требований рынка.
AksIM является истинно-абсолютным энкодером без необходимости резервного аккумулятора – абсолютное положение определяется сразу же после включения питания.

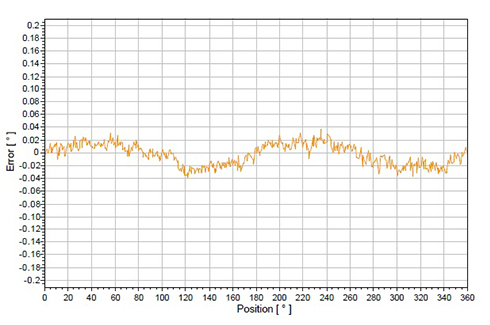
Энкодер AksIM отличается великолепными рабочими характеристиками, удовлетворяя самые жёсткие требования к роботизации. Разрешение устройства достигает 20 бит, точность системы – до +/-0,1°, а повторяемость не хуже единицы разрешающей способности. Энкодер имеет отличную невосприимчивость к загрязнениям и защиту класса IP64, позволяя работать в сложных промышленных условиях.
Коллаборативный робот UR считается уникальным на современном рынке, так как одновременно сочетает в себе простоту, гибкость и безопасность. Роботы UR применяются во многих хорошо известных компаниях, обеспечивая более гибкие производственные процессы и безопасную для персонала рабочую среду.
Инновационное программное обеспечение PolyScope Robot System даёт возможность оператору без глубоких технических знаний или с ограниченным опытом выполнить программирование и наладку робота. Установка занимает менее 3 часов, позволяя задействовать роботы UR в любое время на различных производственных линиях для выполнения новых операций и обеспечивая неограниченные возможности для оперативного переоборудования производственных линий.
Более того, лёгкий робот UR может быть установлен в любом месте на столе, устройстве или даже на потолке, позволяя производителям адаптироваться к различным областям применения. Уникальные датчики и системы контроля усилия, установленные на роботах UR, гарантируют безопасность работников, поэтому роботы могут работать совместно с рабочими без применения защитных ограждений. Когда оператор взаимодействует с роботом с превышением заданного усилия, робот автоматически остановится.

