Hogyan működnek az interferometriás rendszerek?
Hogyan működik az interferometria?
Bevezetés
Az interferometria legalapvetőbb eszközét, a Michelson-interferométert Albert Abraham Michelson, az első amerikai tudományos Nobel-díjas találta fel 1887 ben. Tükrökből és féligáteresztő tükrökből (ún. nyalábosztókból) összeállított rendszere képes volt egyesíteni az egy forrásból származó, különválasztott fénysugarakat. A lézeres interferometria a nagy pontosságú távolságmérés jól kidolgozott módszere.
Alapelvek

A Michelson-interferométer általában egy koherens fényforrás egy beeső nyalábját osztja fel két azonos nyalábra. A két nyaláb más-más úton (pályán) halad, majd a detektor előtt újra egyesül. A két nyaláb által megtett utak különbsége fáziskülönbséget eredményez közöttük. Ez a fáziskülönbség interferencia-mintázatot hoz létre az eredetileg azonos nyalábok között, amelyet a detektor észlel. Ha egy nyalábot két pályára (mérési és referenciapályára) osztottunk, a fáziskülönbség alapján minden olyan dolog észlelhető lesz, amely megváltoztatja a fázist a két pálya mentén. Ez lehet egy magát a pályahosszt érintő fizikai változás vagy annak a törésmutatónak a változása is, amelyen a nyaláb keresztülhalad.
A Michelson-interferometria
A lézerforrásból kilépő lézernyaláb (1) az interferométernél két nyalábra (referencia- (2) és mérési (3) nyalábra) oszlik. Ezek a nyalábok két saroktükörről visszaverődnek, majd az interferométernél ismét egyesülnek, mielőtt elérnék a detektort.
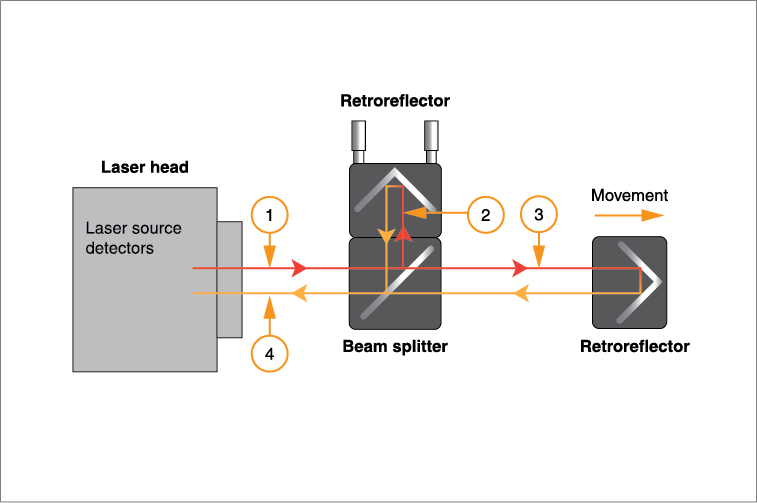
Saroktükröket alkalmazva garantálható, hogy a referencia- és a mérési pályáról származó nyalábok párhuzamosak legyenek egymással, amikor újra egyesülnek az interferométernél. Az újraegyesített nyaláb a detektorhoz ér, ahol egymást erősítve vagy kioltva interferálnak. Erősítő interferencia esetén a nyalábok ugyanabban a fázisban találhatók és csúcsaik egymást erősítik, ami világos csíkokat eredményez. Ezzel szemben a kioltó interferencia esetén a nyalábok más-más fázisban találhatók és csúcsaik egymást kioltják, ami sötét csíkokat eredményez.
Jelfeldolgozás
A detektorban történő optikai jelfeldolgozás révén megfigyelhető a két nyaláb közötti interferencia. A mérőnyaláb elmozdulása a két nyaláb egymáshoz viszonyított fázisának változását eredményezi. Ez az egymást kioltó és erősítő ciklikus interferencia ciklikus változást okoz az újraegyesített fény intenzitásában. A mérőnyalábot/saroktükröt (3) a lézer hullámhosszának felével eltolva a fény intenzitása világos-sötét-világos változási ciklust mutat.
A rendszer pontossága
A lineáris pozíciómérések pontossága attól függ, hogy mennyire pontosan ismert a lézernyaláb hullámhossza. A lézernyaláb működési hullámhossza annak a levegőnek a törésmutatójától függ, amelyen áthalad. Mivel ez az érték a hőmérséklettel, levegőnyomással és a relatív páratartalommal együtt változik, a nyaláb hullámhosszát is változtatni (kompenzálni) kell, hogy a változások tükröződjenek ezekben a paraméterekben.
RLE rendszerek
Az RLE rendszer egy egyedi, fejlett homodin lézeres interferométer-rendszer, amelyet kifejezetten pozíció-visszacsatolásra terveztünk. Mindegyik RLE rendszer egy RLU lézeregységből és egy vagy két, az adott alkalmazás követelményeihez igazodó típusú RLD10 érzékelőfejből áll.
Jelmagyarázat:
Hogyan működik az RLE?
| Lézerforrás | Száloptikás csatlakozó | Interferométeres optika | Mérőoptikák | Érzékelési rendszer | Útmérő-visszacsatolási jelek |
 |  |  |  |  |  |
Hogyan működik az RLU?
Lézerkimenet az RLU-tól az RLD-hez
| Lézerforrás | Stabilizáló elektronika | Száloptikás csatlakozó | Nyaláb pozicionálási stabilitása |
|  | |  |
A jel visszaküldése az RLD egységnek
| Útmérő-hibajelek | Rendszer állapota | Digitális interpoláció | Analóg útmérőjelek |
|  |  |  |
Hogyan működik a RLD?
Lézerkimenet az RLD-től a mérőoptikához
| Interferométeres optika | Sugárterelő |
Minimalizált osztás alatti hibával működő egyedi optikai rendszerek, amelyek a síktükrös vagy a saroktükrös mérési optikákkal egyaránt kompatibilisek |  Beépített optikai ék a telepítési idő minimalizálásához a nyaláb szögének egyszerűsített beállítása révén |
Lézerbemenet a mérőoptikától az RLD-hez
| Analóg útmérőjelek | Érzékelési rendszer | Mérőoptikák |
 Belső analóg négyszögjel, amely az érzékelési rendszerből kerül létrehozásra, és közvetlenül az RLU-nak továbbítódik | A beépített csíkérzékelési rendszer a mérő- és a referencianyaláb interferenciacsíkjait elektronikus jellé alakítja | Erősen fényvisszaverő kemény oxid bevonatú dielektromos tükrök |
HS20 rendszerek

A Renishaw HS20 lézerfej a külső lineáris optikai készlettel együtt a hosszú tengelyű, nagy pontosságú lineáris pozíció-visszacsatoló alkalmazásokhoz kiválóan használható érintésmentes interferometriás lézeres útmérő rendszert alkot.
A HS20 lézerfej minden olyan mozgásvezérlő rendszer pozíciószabályozó hurkába integrálható, amelyet digitális vagy analóg négyszögjel-formátumú útmérő jelek fogadására lehet konfigurálni. A lézerfej közvetlenül a lineáris útmérő rendszerek helyett szerelhető fel az OEM és a korszerűsítési célú alkalmazásokban.
Hogyan működik a HS20?
| Lézerforrás | Stabilizáló elektronika | Mérőoptikák | Hiba- és figyelmeztető | Útmérő-visszacsatolási jelek |
 Stabilizált 2. osztályú (<1 mW) HeNe lézer |  A lézerfrekvencia-stabilitás vezérléséért felel a lézercső fejegységének modulálása révén |  Nagy hatótávolságú optikai megoldások akár 60 m-es géptengelyekhez |  Az egyes lézertengelyekhez külön-külön meglévő aktív hibavezetékek egyszerűen integrálhatók a gép vezérlésébe a zárt hurkú működés megvalósításához |  Ipari szabványú digitális vagy analóg négyszögjel nagy felbontású pozíció-visszacsatoláshoz |
Kompenzációs rendszerek
A lézeres interferométerekről gyakran gondolják, hogy automatikusan maximális mérési pontosságot biztosítanak. A valóságban ennél bonyolultabb a helyzet. Ha lineáris elmozdulást mérünk lézer segítségével levegőben, kritikus fontosságú a környezeti hatásokat kompenzáló rendszer teljesítménye. A lézer és az interferometriás mérőoptika rendkívül nagy lineáris felbontás és pontosságot biztosít, de a „levegős” alkalmazásoknál elsősorban a környezeti tényezőket kompenzáló egység felelős a rendszer mérési pontosságáért.
Az elmozdulást egy meghatározott hullámhossz mutatja. Emiatt a pontos és megismételhető méréshez állandó hullámhossz szükséges. Miközben a lézernyaláb áthalad a levegőn, a hullámhossz a törésmutatótól függően megváltozik.Fontos továbbá, hogy az útmérő mérése nem veszi figyelembe a munkadarab vagy a gépszerkezet hőmérsékletváltozás miatti hőtágulását.
A fenti hibaforrás kompenzálásához és a levegőben vezetett lézersugaras alkalmazások minél nagyobb pontosságához kompenzációs rendszerre van szükség.
A pontosságot befolyásoló környezeti tényezők
Törésmutató tényezők:
 |  |  |
Levegő-hőmérséklet | Relatív páratartalom | Levegőnyomás |
Hőtágulás:
 |
Anyaghőmérséklet |
RCU10 kompenzációs rendszer
Az RCU10 valós idejű négyszögjel-kompenzációs rendszer kiküszöböli a lineáris mozgatórendszerek környezeti hibaforrásait, növelve ezzel a folyamat pontosságát és ismételhetőségét.Az RCU10 érzékelők egész sora segítségével figyeli egy gép környezetét, és fejlett digitális jelfeldolgozás által valós időben kompenzálja a pozíció-visszacsatolási jeleket. Az egység analóg vagy digitális útmérő-formátumban küldi a korrigált visszacsatolási jeleket e a mozgásvezérlésnek.

Hogyan működik az RCU10?
Az alábbi ábra az RCU10 működési folyamatát mutatja be.
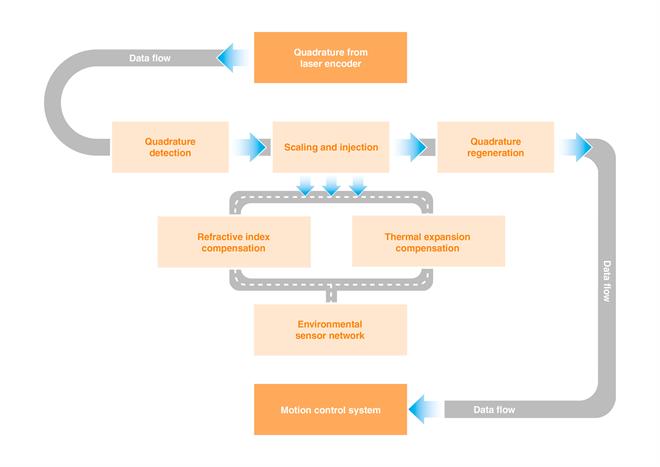
Az RCU10 kompenzáló egység fogadja a digitális négyszögjeleket és az érzékelők által begyűjtött környezeti adatokat, majd kiszámítja a tengelypozíciók korrigálásához szükséges teljes kompenzációt. Ez a szükséges kompenzáció négyszögjel-skálázás és -szuperpozíció (négyszögjel-impulzusok hozzáadása és eltávolítása) révén hozzáadódik az útmérő visszacsatoló jeléhez, és a teljes folyamat minimális késleltetéssel lezajlik a mozgásvezérlésben. A korrigált visszacsatoló jelek digitális vagy analóg útmérő-formátumban továbbítódnak a mozgásvezérlésnek.