¿Cómo funcionan los sistemas interferométricos?
¿Cómo funciona la interferometría?
Introducción
La herramienta más utilizada en interferometría, el interferómetro de Michelson, fue inventada por Albert Abraham Michelson en 1887, primer americano ganador de un Premio Nobel de ciencia. Creó un sistema de espejos y espejos semitransparentes (desdobladores del haz) para combinar haces de luz separados, que provienen de una misma fuente. La interferometría láser es un método muy reconocido de medición de distancias con la máxima precisión.
Principios básicos

Normalmente, un único haz luminoso de entrada constante se bifurca en dos haces idénticos mediante un interferómetro de Michelson. Los dos haces viajan en direcciones distintas, denominadas trayectorias, y se recombinan antes de llegar a un detector. La diferencia de la distancia recorrida por los dos haces crea una diferencia de fases entre ellos. Esta diferencia de fase introducida crea el patrón de interferencia entre las ondas inicialmente idénticas, que se detecta en el detector. Si un único haz se ha bifurcado en dos trayectorias (medición y referencia), entonces, la diferencia de fase diagnostica cualquier cambio producido a lo largo de las trayectorias. Puede ser un cambio físico en la longitud de la trayectoria o un cambio del índice de refracción sobre el que viaja el haz.
Interferometría Michelson
El haz (1) sale de la fuente láser y se divide en dos haces (referencia 2 y medición 3) en el interferómetro. Los haces se reflejan de vuelta desde los dos retrorreflectores y se vuelven a combinar en el interferómetro antes de llegar al detector.

El uso de retrorreflectores asegura que los rayos que vuelven desde los brazos de referencia y medición son paralelos cuando se combinan en el interferómetro. Los haces combinados llegan al detector, donde interfieren entre ellos, de forma constructiva o destructiva. Durante la interferencia constructiva, los dos haces están en fase y los picos de ambos se refuerzan entre sí y producen una franja brillante, mientras que, durante la interferencia destructiva, los haces están desfasados y los picos de uno son anulados por el paso del segundo, lo que genera una franja oscura.
Procesamiento de señal
El procesamiento de señales óptico del detector, permite observar la interferencia de los dos haces. El desplazamiento del haz de medición, provoca el cambio en la fase relativa de los dos haces. Este ciclo de interferencia destructiva y constructiva hace que la intensidad de la luz de los haces combinados sufra una variación cíclica. Cada vez que se mueve la mitad del haz de medición/retrorreflector, se genera un ciclo de variación de intensidad de iluminado a oscuro, que equivale a la mitad de la longitud de onda del láser.
Precisión del sistema
La precisión de las mediciones de posición lineal depende de la precisión con que se conozca la longitud de onda del haz del láser. La longitud operativa del haz láser depende del índice de refracción del aire que atraviesa, y esta se altera con la temperatura, la presión y la humedad relativa del aire. Por tanto, es necesario alterar (compensar) la longitud de onda del haz para incorporar los cambios en estos parámetros.
Sistemas RLE
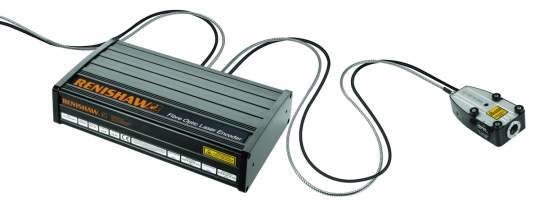
RLE es un sistema exclusivo avanzado de interferometría láser Homodina, diseñado expresamente para aplicaciones de captación de datos de posición precisos. Cada sistema RLE se compone de una unidad láser RLU y uno o dos cabezales detectores RLD10, y los modelos dependen de los requisitos específicos de cada aplicación.
Clave:
¿Cómo funciona el RLE?
| Fuente de láser | Acoplamiento de fibra | Ópticas de interferómetro | Ópticas de medición | Esquema de detección | Señales información del encóder |
 |  |  |  |  |  |
¿Cómo funciona el RLU?
Salida láser del RLU al RLD
| Fuente de láser | Sistema electrónico de estabilización | Acoplamiento de fibra | Estabilidad de enfoque del láser |
|  | |  |
Procesamiento de señales de vuelta al RLD
| Señales error del encóder | Estado del sistema | Interpolación digital | Señales de encóder analógicas |
|  |  |  |
¿Cómo funciona el RLD?
Salida láser del RLD a las ópticas de medición
| Ópticas de interferómetro | Alineador del haz |
Esquemas ópticos exclusivos con SDE minimizado, compatibles con ópticas de medición de espejo plano o retrorreflector |  Óptica en cuña integrada utilizada para minimizar el tiempo de instalación mediante un ajuste del haz angular simplificado |
Entrada del láser desde las ópticas de medición del RLD
| Señales de encóder analógicas | Esquema de detección | Ópticas de medición |
 Cuadratura analógica intrínseca generada desde el esquema de detección, pasada directamente al RLU | El esquema de detección de franja integrado convierte las franjas de interferencia de medición y referencia en una señal electrónica | Espejos dieléctricos con recubrimiento de óxido duro de alta reflectividad |
Sistemas HS20

El cabezal láser HS20 de Renishaw, combinado con un kit de ópticas lineales externas, crea un sistema de encóder láser de interferómetro sin contacto de alta precisión para aplicaciones de captación de posición lineal de ejes largos.
El cabezal láser HS20 puede incorporarse al bucle de control de posición de cualquier sistema de control de moción configurado para aceptar señales de encóder con formato de cuadratura analógica o digital. El cabezal láser puede reemplazarse directamente en los sistemas de encóder lineal, en aplicaciones originales del fabricante o retrofit.
¿Cómo funciona el HS20?
| Fuente de láser | Sistema electrónico de estabilización | Ópticas de medición | Señales de | Señales información del encóder |
 Estabilizado Clase 2 (<1 mW) láser HeNe |  Se utiliza para controlar la estabilidad de frecuencia del láser mediante la modulación del montaje del cabezal del tubo láser |  Soluciones de ópticas de largo alcance para ejes de máquina con longitudes hasta 60 m |  Líneas de error activas, individuales a cada eje láser, que pueden integrarse fácilmente en el control de la máquina para un funcionamiento de bucle cerrado |  Cuadratura analógica o digital estándar del sector para información de posición de alta resolución |
Sistemas de compensación
Generalmente, se presupone que los interferómetros proporcionan automáticamente la máxima precisión de medición. Sin embargo, en la práctica, la situación es más compleja. Para medir desplazamientos lineales en el aire con el láser, el rendimiento del sistema de compensación ambiental es especialmente importante. Las ópticas de medición del láser y el interferómetro proporcionan unos niveles de resolución y precisión muy altos, pero en las aplicaciones ‘en el aire', la unidad de compensación ambiental es la principal responsable de la precisión de medición de los sistemas.
El desplazamiento se representa en forma de longitud de onda específica. Por consiguiente, una medición precisa y repetible depende de la uniformidad de la longitud de onda. Cuando el haz láser viaja por el aire, la longitud de onda varía en función del índice de refracción.Sin embargo, la medición del encóder no tiene en cuenta la expansión de la pieza de trabajo o la estructura de la máquina debida a las variaciones de temperatura.
Para compensar este origen de error y garantizar la máxima precisión de las aplicaciones ‘en el aire', se necesita un sistema de compensación.
Factores ambientales que afectan a la precisión
Factores del índice de refracción:
 |  |  |
Temperatura del aire | Humedad relativa | Presión del aire |
Expansión térmica:
 |
Temperatura del material |
Unidad de compensación RCU10
El sistema de compensación de cuadratura en tiempo real RCU10 corrige directamente las fuentes de errores ambientales en sistemas de desplazamiento lineal para mejorar la precisión y repetibilidad del proceso.El sistema RCU10 controla el entorno ambiental de la máquina mediante una serie de sensores y procesamiento de señales digitales avanzado para compensar en tiempo real las señales de información de posición. La unidad envía las señales de información corregidas al control de moción en formato de encóder analógico o digital.

¿Cómo funciona el RCU10?
El diagrama siguiente muestra el esquema de trabajo de RCU10.
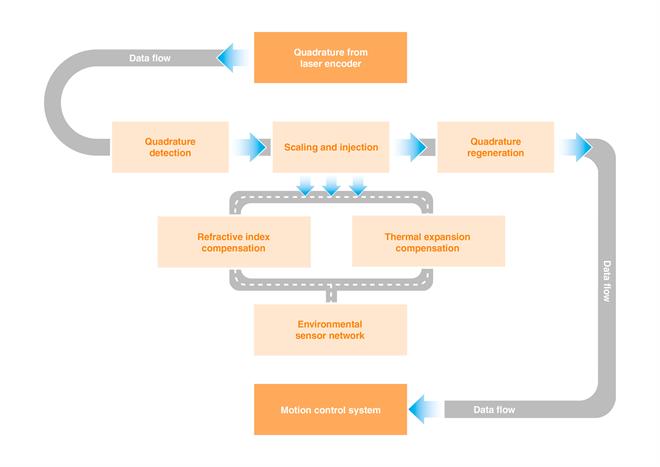
La unidad de compensación RCU10 recibe las señales de cuadratura digital, acompañadas de los datos ambientales obtenidos por una serie de sensores, y calcula la compensación total necesaria para corregir la posición del eje. Seguidamente, se aplica la compensación necesaria mediante el escalado e inyección de cuadratura (adición o supresión de pulsos de cuadratura) a la señal de información del encóder, y se completa el proceso total con la mínima latencia para el control de moción. Las señales de información corregidas se envían al control de moción en formato de encóder digital o analógico.