MODUS™ Planning Suite
Bemästra din CMM med minimal arbetsinsats och öka effektiviteten med MODUS Planning Suite.
MODUS Planning Suite är utformat för att ge MODUS-användare en sats med automatiserade genvägar för att lösa vanliga utmaningar i detaljprogrammering, och maximera nyttan med REVO® CMM-huvuden med lättanvända specialiserade program. Med MODUS Planning Suite-applikationerna kan användarna planera mätvägar runt komplexa geometrikomponenter med minimal arbetsinsats och ökad effektivitet.
Genom att använda avancerad planeringsteknik, erbjuder programvaran offline-verktyg med simulerad rörelse för att skapa DMIS-kod som representerar kollisionsfri detaljmätning.
Det finns för närvarande tre modulära applikationer separat tillgängliga för plattformen MODUS Planning Suite:
MODUS Blade planner
Blade Toolkit
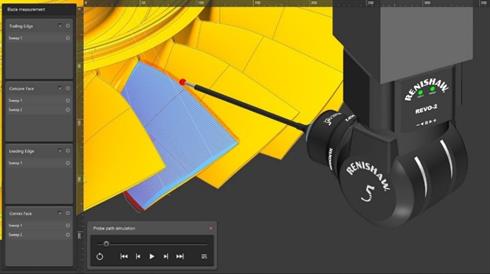
Det fulla bladinspektionsalternativet i MODUS Blade planner gör det möjligt för användare att planera svepskanningar på konkava, konvexa ytor eller bakkanter.
Inställnings- och mätstrategierna låter användaren anpassa mätvägarna, vilket erbjuder möjligheten att kontrollera antalet svep per yta och ändra riktningen på mätningarna mellan tvärgående och längsgående svep.
Sektionsmätning
Blade planner-modulen erbjuder två metoder för att mäta bladsektioner:
- Svepskanning över sektioner med alternativet med sammansatta svep.
Svepskanningar med hög densitet täcker de sektioner där bärytedata samlas in, medan svepskanningar med låg densitet förekommer mellan de sektioner där inga data samlas in. Denna metod reducerar antalet fram- och tillbakarörelser, vilket på så sätt minskar cykeltiden. - Skanning av sektionskurvor på ytor
Kurvskanningar skapas på de konkava och konvexa ytorna, och fulla svepskanningar skapas på fram- och bakkanterna.
MODUS Planning Suite genererar nödvändiga DMIS för att mäta bärytans yta. MODUS 1.9 kan sedan köra denna DMIS och låta användaren utföra bäryteanalys på varje sektion.
Patchmätning
För att verktygen ska kunna planera sträckan för hela bladet och de omgivande ytorna, använder MODUS Blade planner-modulen alla urvalsmetoder som finns tillgängliga i MODUS Patch planner:
- Skapa en patch från en skiss med punkter (område)
- Välj en patch från valda ytor (yta)
- Skapa en patch från punkter på en mittlinje
- Skapa en patch från CAD-kanter
Se en full beskrivning av MODUS Patch planner-modulen för MODUS Planning Suite nedan.
Andra modulära applikationer som finns tillgängliga separat för plattformen MODUS Planning Suite:
MODUS Patch planner
Fram tills nu behövde användarna definiera sina egna vägar för ytsvep med manuella manipulationsverktyg för att undvika kollisioner. Nu levererar den nya applikationen MODUS Patch den effektivaste mätvägen med REVO RSP2-sensorn, snabbt och enkelt, med automatisk planering av vägen.
- Skapa patcher av punkter
Definiera en svepsträcka genom att skapa en serie med punkter för att skapa ett fyrkantigt område på CAD. - Skapa patcher från en yta
Klicka på CAD-modellen för att välja en yta eller en sats med kopplade ytpunkter för att definiera en sträcka. - Skapa patcher från CAD-kanter
Använd CAD-kanter för att fastställa svepsträckan. En MODUS-skiva kan också väljas som en kant med hjälp av detta verktyg. Programmet genererar den kortaste sträckan när start- och slutpunkterna har valts. - Skapa patcher genom att rita mittlinjen
Definiera en svepsträcka genom att skapa en serie med mittlinjepunkter på en yta.
När urvalsmetoden etablerats, kan du vid behov utföra ändringar på svepbredden, riktningen och andra egenskaper i menyn inställningar.
Andra modulära applikationer som finns tillgängliga separat för plattformen MODUS Planning Suite:

Generera punkt- och ytsvep

Generera CAD-kant och mittlinjesvep
MODUS Curve planner
Kurvplaneringsmodulen innehåller två alternativ: RSP2 Curve och RSP3 Curve. RSP3 erbjuder en ökad förmåga att mäta komplexa geometrier med hjälp av olika probenheter.
Kurvor kan definieras genom valet av kanter från CAD-modeller eller genom att klicka på punkter i ett plan.
Skapa kurvor på CAD-kanter
Du definierar kurvor antingen genom att välja kanter på CAD-modellen eller kanter på en skiva som skapats med MODUS.

Skissera en kurva på ett plan
Du definierar kurvor genom att klicka på ett antal punkter i ett plan. En spline placeras för att skapa sträckan.

Ytterligare val för RSP2-kurvalternativ
Skapa en kantkompensering på ett plan
När det nödvändiga planet valts på CAD-modellen och kanterna har valts, tillämpas ett kompenseringsvärde.
En sats med grafiska alternativ kompletterar programvaruinställningarna, vilket gör det lätt att förena och beskära sträckor vilket ger det mest effektiva resultatet.
Flera kanter kan väljas på en enkel yta och sedan förenas. Detta skapar mätningar som inte lämnar ytan, vilket reducerar den tid som rörelserna mellan mätningarna tar.
Skapa en kantkompensering för att undvika egenskaper på ett plan
När ett plan och en kant har valts, detekterar och undviker detta alternativ automatiskt geometrier i CAD-modeller som mätningarna måste undvika, så att sträckan uppdateras när kompenseringsvärdena justeras.
Användaren kan välja en enkel kant på varje kurvmätning.
Ytterligare val för RSP3-kurvalternativ
Vinkelmätningar med fast huvud
RSP3-proben mäter vid fasta huvudvinklar och proben kan komma av ytan vid vissa kurvskanningar så att huvudvinkeln kan ändras.
RSP3-kurvelementet i MODUS-kurvmodulen tillhandahåller förmågan att definiera segment med mätningar, där proben inte kommer bort från ytan. På så sätt kan användaren uppfylla kraven på högprecisionszoner längs en enkel kurvsträcka.
Snabb och enkel att använda
När kurvan valts, kan du lätt redigera parametrar som t.ex. skanningsriktning i inställningar.
För båda metoder med att definiera kurvor, använder applikationen begränsad CMM-rörelse, som minskar CMM-axelrörelsen när kurvor mäts på ett plan.
Kombinationen av begränsade axlar med kollisionsfri rörelseplanering, erbjuder en märkbart kortare programmeringstid för snabb och effektiv kurvmätning.
Andra modulära applikationer som finns tillgängliga separat för plattformen MODUS Planning Suite:

Att begränsa maskinaxelns rörelse till ett enda plan förbättrar noggrannheten och repeterbarheten.
Varför begränsa CMM-rörelsen?
Begränsning av en eller flera axlar på CMM maximerar användningen av REVO® huvudets rörelse och minimerar rörelsen av CMM. Genom att begränsa två axlar och endast flytta i den ena axeln parallellt mot det plan som mäts, är maskinens böjning i det plan som inspekteras och på så sätt upptäcks inga fel. Detta erbjuder möjligheten att mäta detaljer snabbare eller uppnå en högre nivå med noggrannhet från en befintlig maskin.
När du till exempel mäter planheten på ett cylinderblocks tätningsyta, blir det möjligt att använda maskinen snabbare utan att tillföra några mätfel, om du begränsar två axlar. Optimalt används maskinens Z-axel för att flytta REVO upp och ner tills den har den lägsta rörliga massan och X och Y begränsas. I såna fall finns det inga böjkrafter, bara kompression/spänning längs hylsans längd där det är mycket styvt. Om Z inte är möjligt, är X (begränsat i Z och Y) näst lämplig eftersom den har näst lägst rörlig massa. Om du använder Y drar du fortfarande nytta av denna metod jämfört med att flytta huvudet mot och bort från detaljen, så som är fallet med traditionella 5-axliga skanningar.
Ytterligare information
Hjälp och utbildning
Installationspaketet erbjuder instruktionsvideor och enkla CAD-modeller för att underlätta utbildningen.
Programvarukompabilitet
DMIS-kod från MODUS Planning Suite måste köras i MODUS. För full kapacitet krävs MODUS 1.9.
CAD-modeller måste vara i .Sab-format.
Hårdvarukompabilitet
Den hårdvarukombination som stöds för denna version av MODUS Planning Suite är REVO-2 med RSP2-skannande prob.