Hur fungerar interferometriska system?
Hur fungerar interferometri?
Inledning
Det vanligaste verktyget inom interferometri, Michelson-interferometern, uppfanns av Albert Abraham Michelson 1887, den förste amerikanen som vann ett Nobelpris för vetenskap. Han uppfann ett system med speglar och halvgenomskinliga speglar (stråldelare) för att sammanfoga separerade ljusstrålar som kommer från samma källa. Laserinterferometri är en väletablerad metod för att mäta avstånd med hög noggrannhet.
Grundläggande principer

Normalt delas en inkommande stråle från en koherent ljuskälla upp i två identiska strålar med en Michelson-interferometer. Dessa strålar färdas olika rutter, som kallas en väg, och de kombineras igen innan de når en detektor. Skillnaden i avståndet som varje stråle färdats skapar en fasskillnad mellan dem. Det är denna introducerade fasskillnad som skapar interferensmönstret mellan de ursprungligen identiska vågorna, som identifieras på detektorn. Om en enda stråle har delats längs två vägar (mätning och referens) så är fasskillnaden diagnostik över allt som ändrar fasen längs dessa vägar. Detta kan vara en fysisk förändring av själva väglängden, eller en skillnad i brytningsindex som strålen färdas genom.
Michelson-interferometri
Laserstrålen (1) kommer från laserkällan och delas i två strålar (referens (2) och mätning (3)) vid interferometern. Dessa strålar reflekteras tillbaka från de två retroreflektorerna och kombineras igen vid interferometern innan de når detektorn.
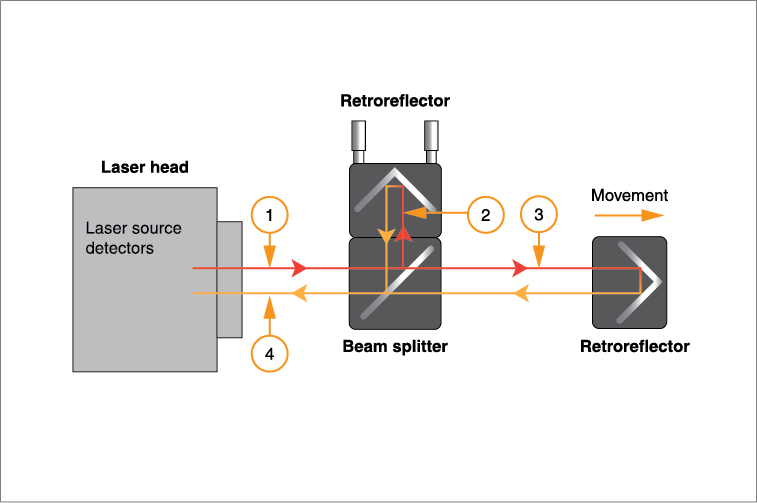
Retroreflektorerna används för att säkerställa att strålarna som kommer från referens- och mätningsarmarna är parallella när de kombineras med varandra igen vid interferometern. Den återkombinerade strålen når detektorn där de interfererar med varandra antingen konstruktivt eller destruktivt. Under konstruktiv interferens är de två strålarna i fas och topparna hos båda strålarna förstärker varandra, vilket resulterar i en ljus kant, och under destruktiv interferens är strålarna ur fas och topparna hos en stråle upphävs av dalarna i den andra strålen, vilket resulterar i en mörk kant.
Signalbearbetning
Den optiska signalbearbetningen i detektorn möjliggör att dessa två strålars interferens observeras. Förskjutningen av mätningsstrålen orsakar förändringar i den relativa fasen hos de två strålarna. Denna cykel av destruktiv och konstruktiv interferens orsakar att intensiteten hos det rekombinerade ljuset undergår cyklisk variation. En cykel av variation i intensitet från ljust till mörkt till ljust inträffar varje gång mätningsstrålen/retroreflektorn (3) flyttas med halva laservåglängden.
Systemets noggrannhet
Noggrannheten hos de linjära positionsmätningarna beror på till vilken noggrannhet laserstrålens våglängd är känd. Laserstrålens driftvåglängd beror på brytningsindexet hos luften som den passerar genom, och detta varierar med luftens temperatur, lufttrycket och den relativa luftfuktigheten. Därför måste strålens våglängd ändras (kompenseras) med hänsyn till förändringar hos dessa parametrar.
RLE-system
RLE-systemet är ett unikt, avancerat homodynlaserinterferometer-system speciellt utvecklat för applikationer med positionsåterkoppling. Varje RLE-system består av en RLU-laserenhet och en eller två RLD10-detektorhuvuden, vilkas modell beror på kraven hos den specifika applikationen.
Nyckel:
Hur fungerar RLE?
| Laserkälla | Fiberkoppling | Interferometeroptik | Mätoptik | Detektionsprincip | Pulsgivar-feedbacksignaler |
 |  |  |  |  |  |
Hur fungerar RLU?
Laserutmatning från RLU till RLD
| Laserkälla | Stabiliseringselektronik | Fiberkoppling | Strålinriktningsstabilitet |
|  | |  |
Bearbeta signalen tillbaka till RLD:n
| Pulsgivarfelsignaler | Systemets status | Digital interpolering | Analoga pulsgivarsignaler |
|  |  |  |
Hur fungerar RLD?
Laserutmatning från RLD till mätoptiken
| Interferometeroptik | Strålriktare |
Unika optiska principer med minimerad SDE kompatibel med mätoptik med antingen planspegel eller retroreflektor |  En inbyggd optisk kil som används för att minimera installationstiden genom att möjliggöra förenklad strålvinkeljustering |
Laserinmatning från mätoptik till RLD
| Analoga pulsgivarsignaler | Detektionsprincip | Mätoptik |
 Reel analog kvadratur genererad från detektionsmetoden och direkt skickad till RLU:n | Inbyggd kantdetekteringsmetod konverterar interferenskanterna från mätning och referens till en elektronisk signal | Mycket reflektiva hårdoxidbelagda dielektriska speglar |
HS20-system

Renishaws laserhuvud HS20, tillsammans med ett externt linjärt optikpaket, bildar ett kontaktfritt interferometriskt laserpulsgivarsystem för applikationer med långa axlar, hög noggrannhet och linjär positionsåterkoppling.
HS20-laserhuvudet kan infogas i positionskontrolloopen hos alla rörelsestyrningssystem som kan konfigureras för att acceptera digitala eller analoga pulsgivarsignaler med kvadraturformat. Laserhuvudet kan monteras som en direkt ersättning för linjära pulsgivarsystem både i OEM- och eftermonteringsapplikationer.
Hur fungerar HS20?
| Laserkälla | Stabiliseringselektronik | Mätoptik | Fel- och varnings- | Pulsgivar- feedbacksignaler |
 Stabiliserad Klass 2 (<1 mW) HeNe-laser |  Används för att kontrollera laserfrekvensstabiliteten genom att modulera laserrörvärmarenheten |  Optiklösningar med lång räckvidd för maskinaxellängder upp till 60 m |  Aktiva fellinjer, individuella för varje laseraxel, kan enkelt integreras i maskinstyrningen för sluten drift |  Digital eller analog kvadratur med branschstandard för positionsfeedback med hög upplösning. |
Kompenseringssystem
Laserinterferometrar antas ofta automatiskt ge överlägsen mätnoggrannhet. Men i verkligheten är situationen mer komplicerad. När linjära förskjutningar mäts i luft med en laser är prestandan hos miljökompenseringssystemet speciellt viktigt. Lasern och den interferometriska mätoptiken ger mycket hög nivå av linjär upplösning och precision, men för ”i luft”-applikationer är det miljökompenseringsenheten som huvudsakligen ansvarar för systemets mätnogggranhet.
Förskjutningen representeras i form av en specificerad våglängd. Därför beror noggrannheten och repeterbarheten hos mätningen på att väglängden är konstant. När laserstrålen färdas genom luften varierar våglängden beroende på brytningsindexet.Å andra sidan tar mätningen från pulsgivaren inte hänsyn till arbetsstyckets eller maskinstrukturens utvidgning på grund av temperaturvariationer.
För att kompensera för den ovanstående felkällan och säkerställa högsta noggrannhet för ”i luft”-applikationer är ett kompenseringssystem nödvändigt.
Miljöfaktorer som påverkar noggrannheten
Brytningsindexfaktorer:
 |  |  |
Lufttemperatur | Relativ fuktighet | Lufttryck |
Värmeutvidgning:
 |
Materialtemperatur |
Kompenseringssystem RCU10
Realtidskvadraturkompenseringssystemet RCU10 hanterar miljöfelkällor i linjära rörelsesystem för att förbättra processens noggrannhet och repeterbarhet.RCU10 övervakar maskinens omgivning via en serie med sensorer och använder avancerad digital signalbearbetning för att utföra kompensering i realtid på positionsfeedbacksignalerna. Enheten skickar de korrigerade feedbacksignalerna till rörelsestyrenheten i antingen analogt eller digitalt pulsgivarformat.

Hur fungerar RCU10?
Diagrammet nedan visas arbetsflödet för RCU10.
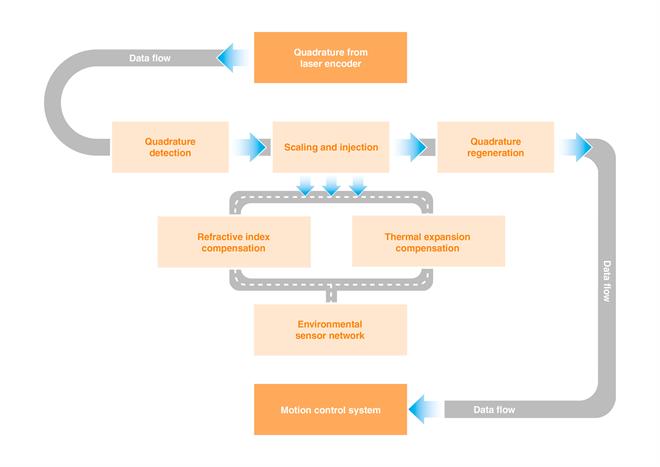
Kompenseringsenheten RCU10 accepterar digital kvadratur, tillsammans med miljödata som samlats in av en serie med sensorer, och beräknar den totala mängden kompensering som är nödvändig för att korrigera axelpositionen. Den nödvändiga kompenseringen aktiveras sedan genom kvadraturskalning och injektion (tillägg eller borttagning av kvadraturpulser) i pulsgivarfeedbacksignalen, och hela processen slutförs med minimal tidsfördröjning till rörelsestyrenheten. De korrigerade feedbacksignalerna skickas till rörelsestyrenheten i antingen digitalt eller analogt pulsgivarformat.