Los encóderes magnéticos posibilitan el control de estabilización de un vehículo robótico de dos ruedas autoequilibrado
En el diseño de un vehículo robótico de dos ruedas autoequilibrado, la medición precisa a alta velocidad de la rotación angular es un requisito imprescindible. Además, la reducción al mínimo del peso y el tamaño del componente es igualmente crucial. Los estudiantes de ingeniería de la Tokyo Denki University encontraron la respuesta en el encóder magnético rotatorio RM08, de la empresa asociada de Renishaw, RLS.
Historial
Dedicada a la enseñanza de ciencia y tecnología, la Tokyo Denki University se fundó en 1907 por dos jóvenes ingenieros, Seiichi Hirota y Shinkichi Ogimoto. Su principal objetivo era promocionar la enseñanza de ingeniería como base de desarrollo de la economía nacional.
En colaboración con el departamento de robótica y mecatrónica de la universidad, Jun Ishikawa es un investigador pionero en distintos campos tecnológicos, que incluyen el desarrollo de sistemas de control robótico. Jun propuso a sus alumnos el reto de crear un vehículo robótico de dos ruedas autoequilibrado. Para este proyecto, sus alumnos eligieron en encóder de control de posición magnético rotatorio RM08 de RLS, empresa filial de Renishaw.
 El RM08 es un encóder magnético rotatorio de alta velocidad en miniatura
El RM08 es un encóder magnético rotatorio de alta velocidad en miniatura
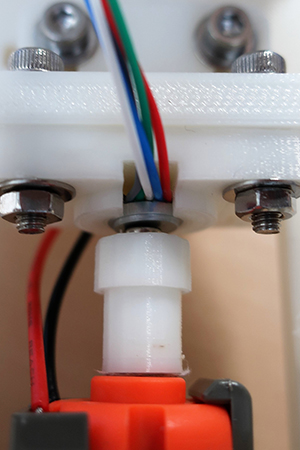
Encóder acoplado en el eje del motor
Objetivo
Ishikawa retó a sus alumnos de la universidad a resolver un problema teórico de control clásico: el péndulo invertido. La base del conocido transportador personal Segway, el péndulo invertido tiene su centro de masa encima del punto de pivote.
Al contrario que un péndulo suspendido, que vuelve de forma natural a una posición de equilibrio estable tras un desplazamiento, el péndulo invertido es inestable por naturaleza. Imagine un taco de billar o el palo de una escoba en equilibrio vertical en la palma de la mano, se caería si no se corrige continuamente la posición de la mano.
Un péndulo invertido más corto pierde la posición vertical más rápidamente que uno más largo, por lo que son necesarios ajustes de posición más frecuentes y crea más problemas de control: mantener en equilibrio un lápiz en la mano es más complicado que hacerlo con un taco de billar.
Una forma de solucionar el problema, es montar el punto de pivote sobre una plataforma con ruedas, como en el Segway. Este tipo de vehículo obtiene las entradas de inercia de una IMU (unidad de medición de inercia) que contiene dos sensores: un acelerómetro y un giroscopio.
En este caso, se utilizan los dos acelerómetros del eje vertical y horizontal para determinar la aceleración angular debida a la gravedad. Mediante el control continuo del ángulo de inclinación y la velocidad angular del péndulo, puede utilizarse un sistema de control de DP (derivada proporcional) para mover las ruedas adelante y atrás para mantener el equilibrio.
Aplicando un enfoque similar en su propio sistema de control, los alumnos de Ishikawa debían diseñar e integrar una solución eficaz de tres fases: detección del ángulo de inclinación, lógica de control y circuitos de accionamiento del motor. En el diseño de los circuitos impresos para esta aplicación de control, un tamaño y peso reducidos es imprescindible para su integración en el manillar. Las arquitecturas de los circuitos impresos se han optimizado para asegurarse de que se consiguen todas las funciones en el tamaño más reducido.
Solución
La placa de circuito impreso se coloca en la parte superior del péndulo, dentro del manillar, y disponen de todos los circuitos electrónicos necesarios, incluido un giroscopio de estado sólido, un microcontrol, un motor de CC y los componentes de alimentación y control.
En la parte inferior de la plataforma de ruedas, hay dos ejes: un eje horizontal que une las ruedas y un eje vertical accionado por un motor de CC compacto. Un engranaje biselado individual en la intersección entre los ejes permite al motor accionar las ruedas en las dos direcciones.
Para un control más efectivo, el sistema debe mantener la orientación en un rango reducido de ángulos casi verticales. Si el vehículo se inclina más de 30 grados en cualquier dirección, podría perder la estabilidad. Para mantener el equilibrio, las ruedas deben estar en movimiento constante con una aceleración y velocidad minuciosamente calculada.
Para alcanzar el nivel de rendimiento de control de movimiento necesario, los alumnos necesitaban un encóder de posición de alta resolución que permitiera controlar y regular la salida del motor. También debía ser lo suficientemente pequeño y ligero para poder instalarlo en la estructura vertical estrecha del vehículo.
Tras considerarlo minuciosamente, la solución llegó con el encóder magnético rotatorio RM08 de RLS, una empresa filial de Renishaw. Este encóder magnético rotatorio sin fricción y sin contacto pesa tan solo 2 g, incluidos los cables, y está equipado con un alojamiento del sensor de 8 mm de diámetro y solo 3 mm de grosor.
Los alumnos diseñaron un collar de nylon estrecho, que sirve de correa de transmisión mecánica entre el eje del motor y el actuador magnético del encóder RM08, que añade menos de 0,5 g al conjunto. El encóder RM08 genera una salida de 12 bits de resolución (4 096 pasos por revolución), adecuada para un funcionamiento a alta velocidad de hasta 30 000 rpm, con una precisión de ±0,3 º.
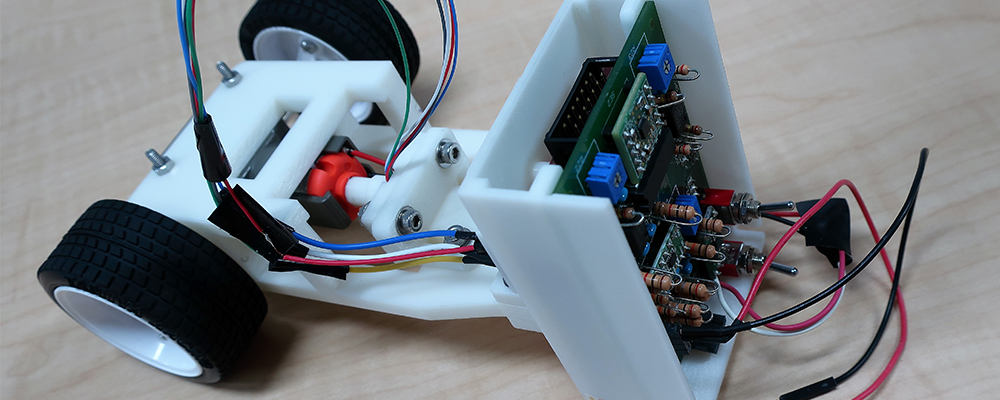
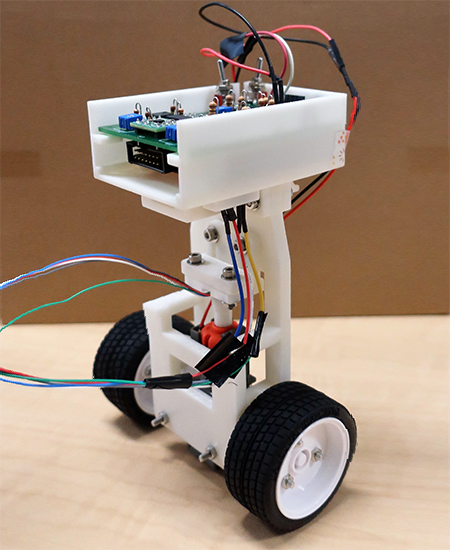
El vehículo robótico de dos ruedas autoequilibrado, diseñado por los estudiantes de ingeniería de la Tokyo Denki University
Resultados
Al usar el encóder magnético rotatorio de alta velocidad RM08 para medir la rotación angular con una resolución de 12 bits, los alumnos de la Tokyo Denki University pudieron diseñar un programa de control de movimiento para un vehículo robótico de dos ruedas, con autoequilibrio y capacidad para mantenerse en pie.
El encóder RM08 tiene clasificación IP68 y está diseñado para integrarse en una amplia gama de aplicaciones de alta fiabilidad en grandes tiradas para fabricantes de equipos originales.
Pero, sobre todo, el encóder magnético rotatorio está también pensado para las exigentes restricciones físicas de diseño del vehículo. Puesto que es un componente muy compacto y ligero, ha permitido a los alumnos superar las limitaciones de espacio y transporte de carga.
El éxito de este proyecto ha proporcionado a los alumnos la confianza para explorar otros proyectos robóticos.

